
Research Highlights
Oceanus Magazine

AUV Sentry leads the way in mapping and monitoring methane bubbling from the seafloor

40 years after helping reveal the Titanic, Alvin returns to the North Atlantic to document two other legendary shipwrecks
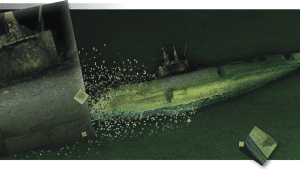


During a 1967 dive off Florida, a startled swordfish rammed the famed submersible Alvin—lodging its sword in the hull and forcing the crew to abort the mission
News Releases
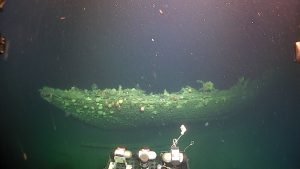
The Heroic Age Expedition, led by the Royal Canadian Geographical Society in partnership with Woods Hole Oceanographic Institution, reveals the famed Antarctic explorer’s last ship, Terra Nova in stunning detail

The Royal Canadian Geographical Society, in partnership with WHOI, will undertake “once-in-a-generation” expedition to survey Sir Ernest Shackleton’s Quest and Captain Robert Falcon Scott’s Terra Nova

New underwater robot opens new possibilities in coral reef conservation by autonomously identifying biodiversity “hotspots”

Satellite measuring land, polar, and coastal regions could launch by 2030

The findings point to warming ocean temperatures, shifting nutrient regimes, and changing circulation patterns as likely contributors to this emerging basin-scale redistribution of Sargassum.
News & Insights

NSF program fosters collaboration between indigenous communities and traditional scientists, allowing WHOI’s autonomous vehicles to shed light on a changing Arctic
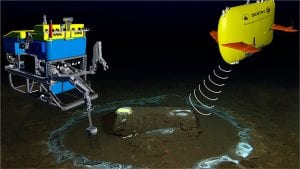
An investigative report this week in the LA Times features the work of WHOI’s marine geochemistry lab in identifying the discarded barrels and analyzing samples from the discovery.