
Underwater Vehicles
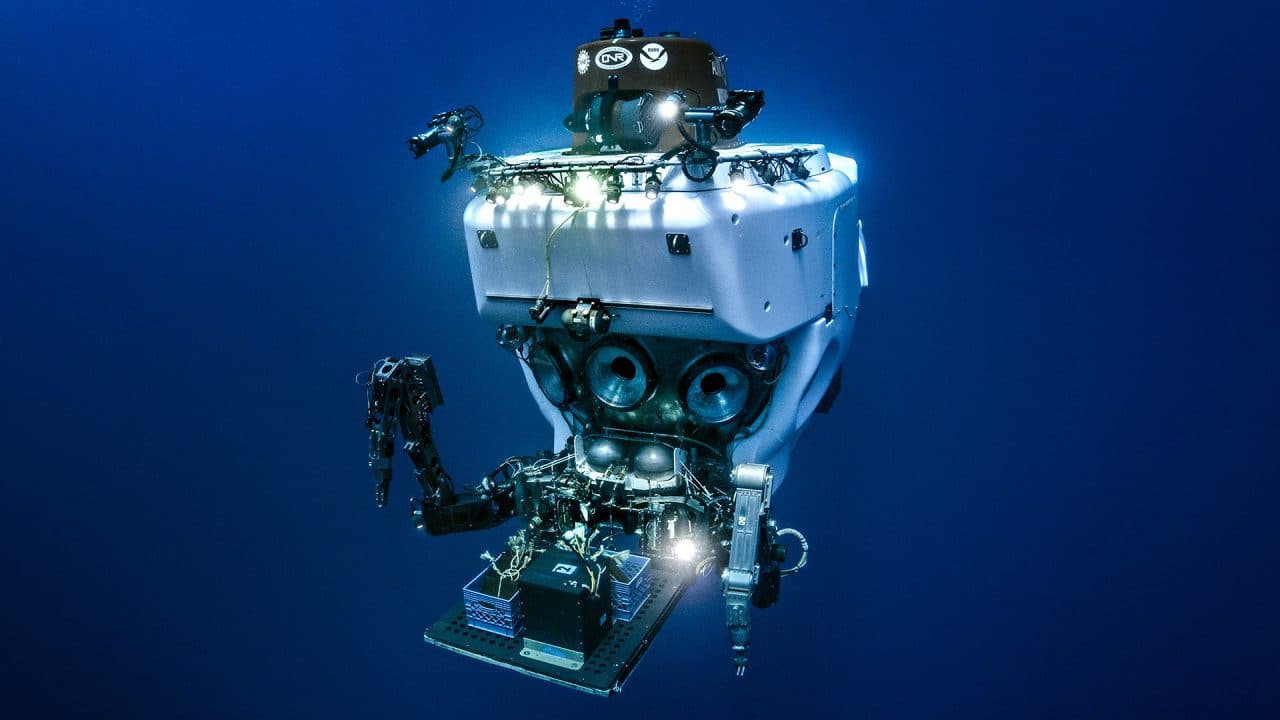
(Photo by Luis Lamar, Woods Hole Oceanographic Institution)
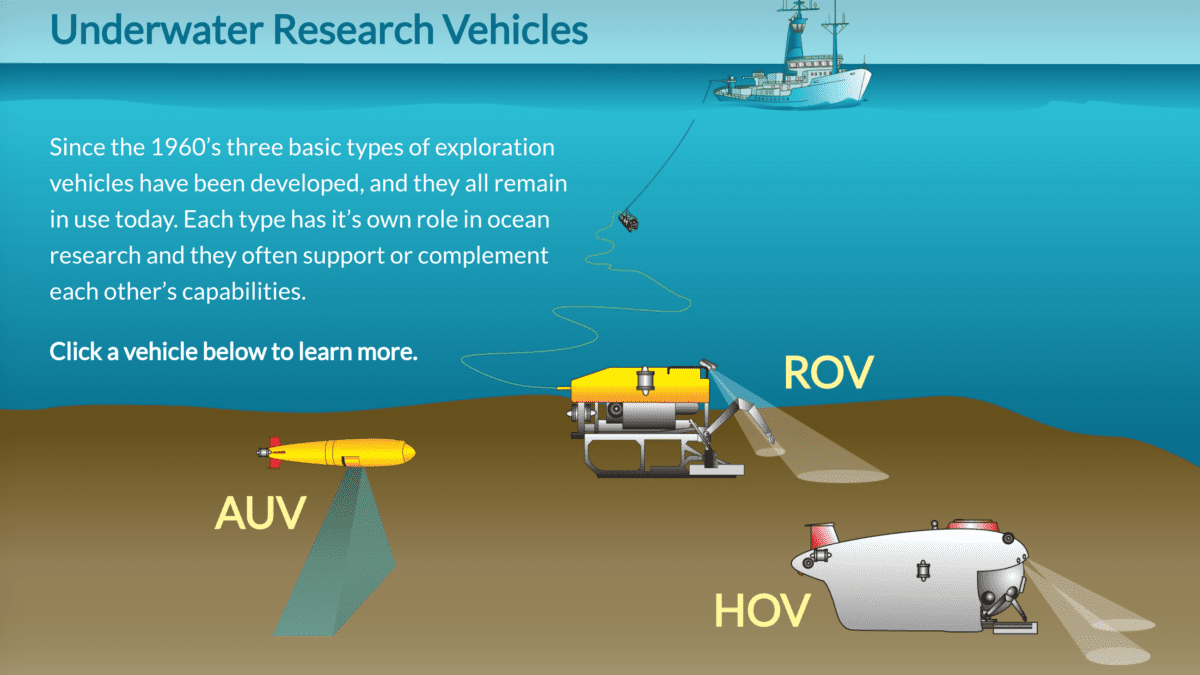
What are underwater vehicles?
In order to understand the ocean, scientists often find they have to get themselves or their instruments into very specific parts of it. Traditionally, researchers have used ships to photograph the depths, to drop floats and drifters into the currents, and to collect samples of water, rock, and marine life. In recent years, the spectrum of available observing tools has grown to include human-occupied submersibles, remote-controlled vehicles, and autonomous robots.
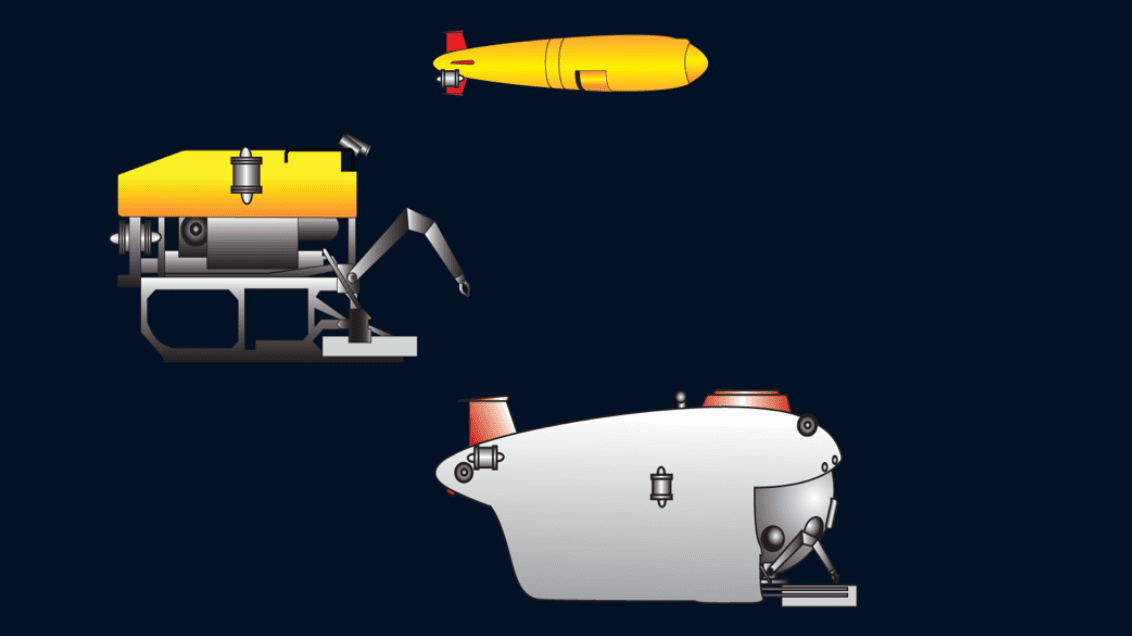
Human Occupied Vehicles (HOVs)
HOVs take small teams of scientists and engineers directly to the seafloor for limited periods of time. They usually accommodate three people and are built to withstand the extreme pressure thousands of meters below the surface of the ocean and permit scientists to make detailed observations, collect specific samples, and place, retrieve, or conduct experiments on the seafloor and in the deep ocean. In addition to the vehicle’s manipulator arm, cameras, sensors, and collection instruments, the HOV also carries another important data-gathering device: the scientists’ own eyes and knowledge of the deep, which is a key advantage of using the vehicles, despite the additional complexity of designing and deploying them.
Remotely Operated Vehicles (ROVs)
ROVs are tethered robots that allow researchers to make observations, collect samples, and conduct experiments while controlling the vehicle from the surface. The vehicles can remain below the surface for a day or more at a time, and can hover like a helicopter over a seafloor target or survey a wide area. The tether sends and receives control signals, vehicle sensor data, and images and allows the pilot to control the vehicle’s manipulator arm in real time to carry out targeted surveys and collections, and help carry out detailed experiments in the deep ocean.
Autonomous Underwater Vehicles (AUVs)
AUVs are programmable, robotic vehicles that, depending on their design, can drift, drive, or glide through the ocean without real-time control by human operators. Some AUVs communicate with operators periodically or continuously through satellite signals or underwater acoustic beacons to permit some level of control. AUVs allow scientists to conduct other experiments from a surface ship while the vehicle is off collecting data elsewhere on the surface or in the deep ocean. Some AUVs can also make decisions on their own, changing their mission profile based on environmental data they receive through sensors while under way.
Hybrid Remotely Operated Vehicle (HROVs)
HROVs combine design advantages of two types of vehicles in a single platform. An HROV can operate as a free-swimming autonomous underwater vehicle (AUV), flying through the ocean like an aircraft to survey and map large areas with onboard sonar, sensors, and cameras. It can also be converted aboard ship into a remotely operated vehicle (ROV), connected to a surface ship via a lightweight, micro-thin fiber-optic tether that permits scientists and operators on the surface to control the vehicle and its manipulator arm to carry out targeted surveys and collections, and help carry out detailed experiments in the deep ocean.
News & Insights
HOV Alvin temporarily halts engineering test dives
Test dives for Alvin’s 6500 meter certification have been postponed, a day after the sub reached a record 5338 meters (17,513 feet)
Meet the Alvin 6500 Team: Drew Bewley
Alvin engineer and pilot Drew Bewley on what best prepared him to work on a one-of-a-kind submersible and the overhaul that will take Alvin to 6500 meters.
Meet the Alvin 6500 Team: Danik Forsman
Interview with Danik Forsman, Alvin Pilot and mechanical section leader on rebuilding Alvin for 6,500-meters and mentorships that helped him become a pilot.
Meet the Alvin 6500 Team: Lane Abrams
Lane Abrams talks about designing electronics for the bottom of the ocean and project management of Alvin’s electrical updates for the 6500 meter overhaul.
Meet the Alvin 6500 Team: Francis Elder
An interview with Francis Elder, lead mechanical engineer for the Alvin Group. Find out how the team has designed a new pump to take Alvin to 6,500 meters.
News Releases
Woods Hole Oceanographic Institution honored with IEEE Milestone for Technical Innovation and Excellence
Human-occupied submersible Alvin makes historic dive
[ ALL ]
WHOI in the News
Woods Hole scientists explore new deep-sea phenomenon
‘Like a magic carpet.’ New creature seen by Cape resident off Costa Rica now has his name
Navy submarine just tested a torpedo tube-recovered drone
Scientists drop robot into dark ocean, film weird brilliant world
[ ALL ]
From Oceanus Magazine
Our eyes on the seafloor
A Q&A with WHOI marine microbiologist Maria Pachiadaki on sampling the deep ocean with Jason
3 memorable Jason Dives
Volcanoes, vents, and creatures of the deep through the lens of ROV Jason
Up close and personal
Ocean robots work alongside marine animals to study their behavior
Robots to the Rescue
How the next generation of ocean robots will help solve the planet’s most pressing problems
Group Chat
Underwater robots communicate in text-like fashion off the coast of Oahu

Multimedia


Related Links

HOV Alvin
The deep diving submersible Alvin helped to turn a sunless, freezing marine world into a new frontier.
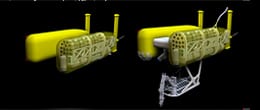
HROV Nereus
A one-of-a-kind vehicle that works in two modes, a free-swimming, autonomous robot and a remotely operated vehicle linked to a surface ship.

HOV Alvin
A 3-person research submarine taking scientists deep into the ocean.

HOVDeep Sea Challenger
A one-person human-occupied vehicle (HOV) that was built to descend to and explore the deepest places in the ocean.

HROV Nereus
Operating in two modes; as an autonomous, or free-swimming, vehicle for wide area surveys (left) and as a tethered, or cabled, vehicle for sampling and other tasks.

ROV Jason
A remotely operated vehicle that gives scientists immediate, real-time access to the sea floor.

AUV REMUS
An series of autonomous vehicles designed for coastal monitoring as well as survey operations at various depths in the ocean.

AUV Sentry
An autonomous underwater vehicle capable of exploring the ocean down to 4,500 meters.

AUV Seabed
An autonomous vehicle suited to collect highly detailed sonar and optical images of the deep seafloor.

Spray Glider
An autonomous vehicle that can dive to depths of over 1,000 meters and can stay at sea for months at a time.
Center for Marine Robotics
An autonomous vehicle that can dive to depths of over 1,000 meters and can stay at sea for months at a time.
National Deep Submergence Facility
An autonomous vehicle that can dive to depths of over 1,000 meters and can stay at sea for months at a time.
Oceanographic Systems Laboratory
An autonomous vehicle that can dive to depths of over 1,000 meters and can stay at sea for months at a time.
Deep Submergence Laboratory
An autonomous vehicle that can dive to depths of over 1,000 meters and can stay at sea for months at a time.
 Acoustics
Acoustics  Imaging
Imaging 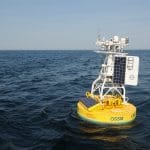 Moorings & Buoys
Moorings & Buoys  Ocean Modeling
Ocean Modeling  Ocean Observatories
Ocean Observatories  Ships
Ships