Robots to the Rescue
How the next generation of ocean robots will help solve the planet’s most pressing problems
 This article printed in Oceanus Summer 2023
This article printed in Oceanus Summer 2023
Estimated reading time: 18 minutes
Victoria Preston watched as the ChemYak, a robotic kayak rigged with sensors, navigated the shallow, ice-filled waters of Cambridge Bay in Nunavut, Canada. Preston, a doctoral student at the time, was working with a team of researchers looking into the release of greenhouse gases in the Arctic during the annual spring thaw. The ChemYak allowed the team to take thousands of in situ measurements, instead of needing to bring water samples back to the lab.
When we think about the power of putting instruments on robotic machines that can place those instruments optimally, it’s so different than the oceanography of just a few decades ago,” says Preston, who is now a postdoctoral investigator at the Woods Hole Oceanographic Institution (WHOI). “Having access to so much data is changing the game in many fields.”

To monitor changes in a rapidly warming Arctic, scientists deploy autonomous surface vehicle ChemYak in Cambridge Bay, Nunavut, where it uses an array of sensors to measure the rapid release of greenhouse gases in the spring thaw. (Photos by William Pardis, © Woods Hole Oceanographic Institution)
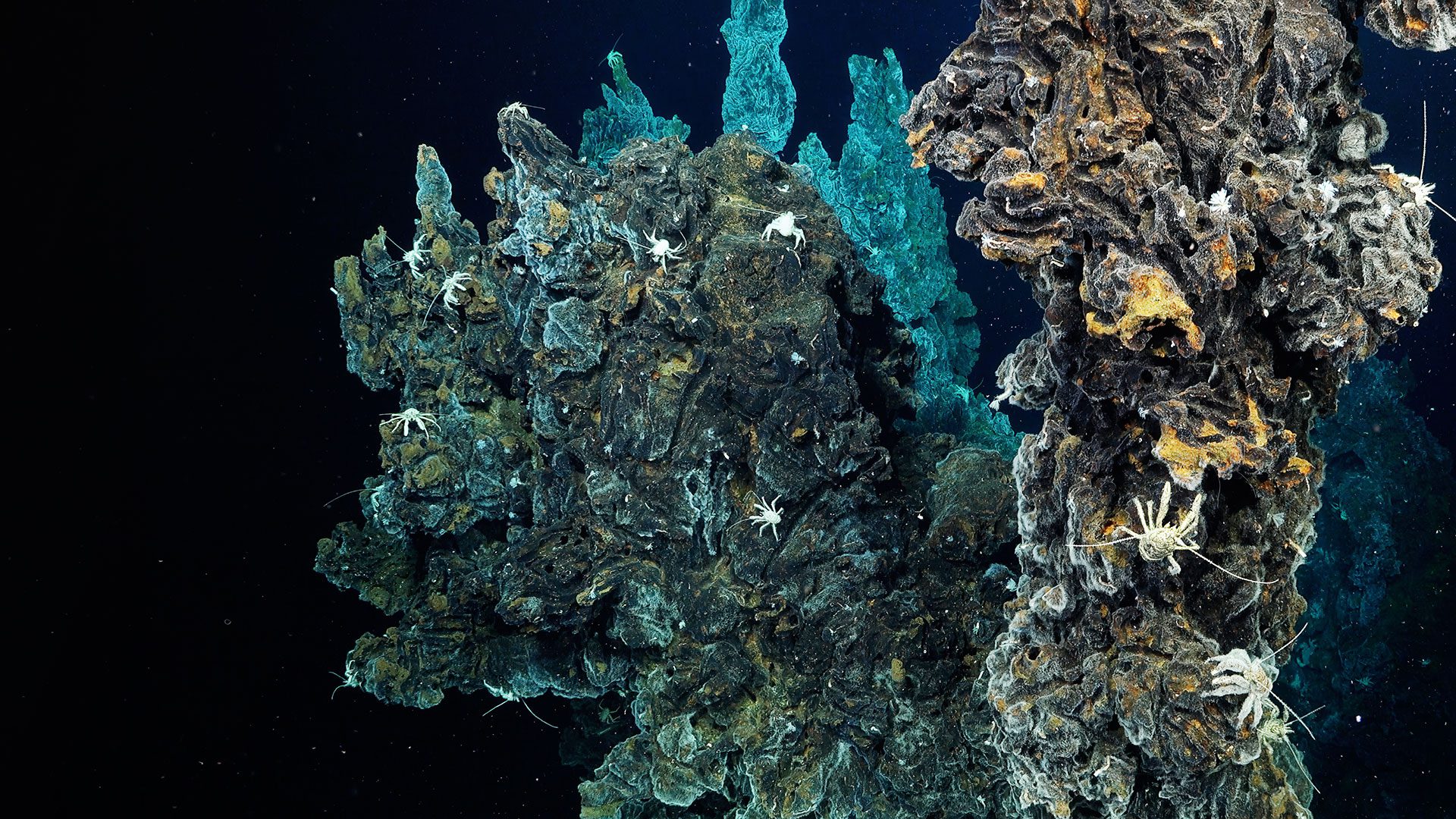
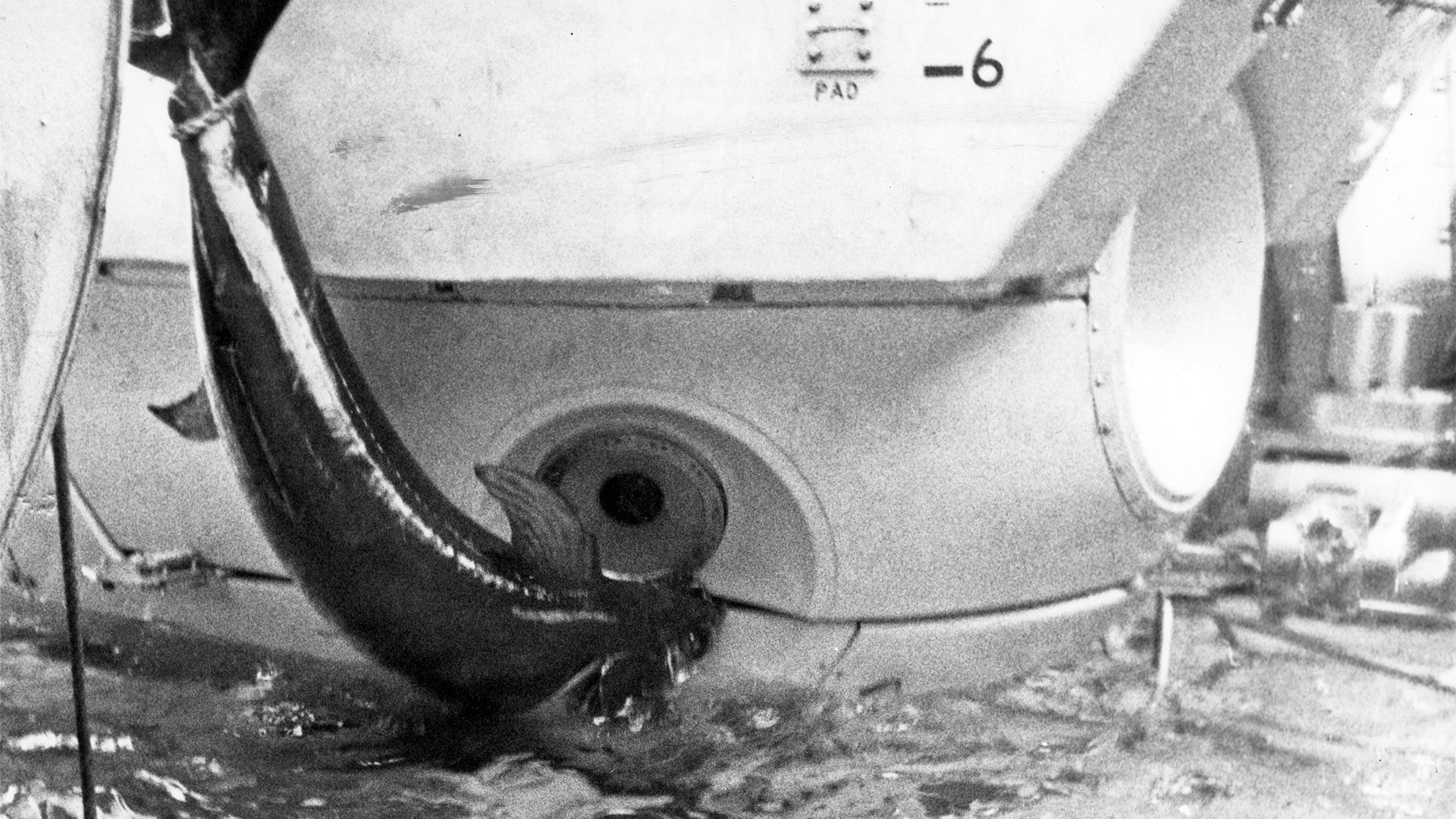
Robots are a vital tool for ocean science and their role has only grown over time. The first videos of deep-sea hydrothermal vents and the unexpected plethora of life they support were taken in 1977 by Alvin, WHOI’s crewed submersible. Since then, researchers have been able to explore details of the seafloor through remotely operated vehicles (ROVs) like Jason, which are tethered to a ship, or map areas of it with autonomous underwater vehicles (AUVs) like Sentry, sent out on preprogrammed missions.
With improved longevity, battery life, processing power, and intelligence, ocean robots have grown into new roles. Some are jacks-of-all trades, with swappable sensor packages for different missions, and others are specialists designed for under-ice exploration or other harsh environments. They act as scouts, explorers, warning systems, monitors, and, increasingly, scientific partners.
“I don’t think we’ll ever stop wanting a vehicle that can take people to the deep sea to do science in a real, 3D space, but there are a lot of ways that we want to take measurements in the ocean that don’t require us to go out there,” says Anna Michel, chief scientist of WHOI’s National Deep Submergence Facility. “Because of big problems like climate change, there’s a lot of need for technology to monitor the oceans. We’re nowhere near having too many robots.”
As designs and technology continue to evolve, robots of the future will be integral parts of understanding and helping to address some of the biggest challenges facing the ocean, including the climate crisis, dying coral reefs, and other damages caused by human activity.

To monitor changes in a rapidly warming Arctic, scientists deploy autonomous surface vehicle ChemYak in Cambridge Bay, Nunavut, where it uses an array of sensors to measure the rapid release of greenhouse gases in the spring thaw. (Photos by William Pardis, © Woods Hole Oceanographic Institution)
But the technological innovations needed to make this future a reality are not insignificant. We need ocean robots that are affordable, independent, long-lasting, networked, and loaded with sensors. We need the capacity to store, process, and transmit vast amounts of data. We need long-lasting batteries and charging stations powered by renewable energy sources. And we need all of this at an unprecedented scale.
Monitoring a changing ocean
Robotic platforms like the ChemYak provide valuable access to hard-to-reach places and are great for investigating specific events or areas. But their deployments are measured in hours, not weeks or months—researchers have to make sure they’re in the right place at the right time. To make accurate predictions for the ocean and our planet as the climate continues to change, we need to combine these local observations with consistent, long-term data sets to reveal both ongoing changes and sporadic or seasonal events.
Researchers and research vessels can’t be everywhere at once, but fleets of long-lived, inexpensive robots can fill in the gaps and, in some cases, already are. Around 4,000 Argo floats drift through the world’s oceans, recording temperature and salinity profiles through the water column, which help us predict and track extreme weather. Scientific buoys, moored and drifting, collect data on the air-sea interactions that produce El Niño events and alert us to everything from tsunami waves to endangered marine mammals. Torpedo-shaped gliders loaded with sensors coast through different layers of the ocean for months at a time, improving predictions of tropical storm and hurricane intensity, while helping us understand the ocean’s currents, which play a critical role in our climate system.
“Ocean robots are heading towards longer endurances, shore launch, and autonomous recovery capabilities.”
—WHOI senior engineer Mike Jakuba
“Ocean robots are heading towards longer endurances, shore launch, and autonomous recovery capabilities, at-sea maintenance—these trends have been going on for a long time, but some of them are finally maturing,” says Mike Jakuba, a senior engineer at WHOI. “I don’t see research ships or ship-launched AUVs ever going away, but operations are going to become more autonomous and less people-intensive at sea.”
One of the major limiting factors for today’s ocean robots is power. Engineers often have to make trade-offs between a robot’s capabilities—which sensors it uses, how quickly it travels, what information it can process on board—and how long it can operate independently.
Jakuba is collaborating with researchers at WHOI and the University of Washington on a low-power system to improve undersea navigation for ocean gliders, autonomous robots that use changes in their buoyancy to cruise slowly through the ocean.
Typically, underwater navigation systems use a lot of power. To avoid that, ocean gliders only get an accurate location when they surface and connect to satellites. Underwater, they navigate by dead reckoning—estimating their position based on where they started and the speed and direction they have traveled. This type of navigation doesn’t account for ocean currents, so a glider’s estimated location can be off by several kilometers.
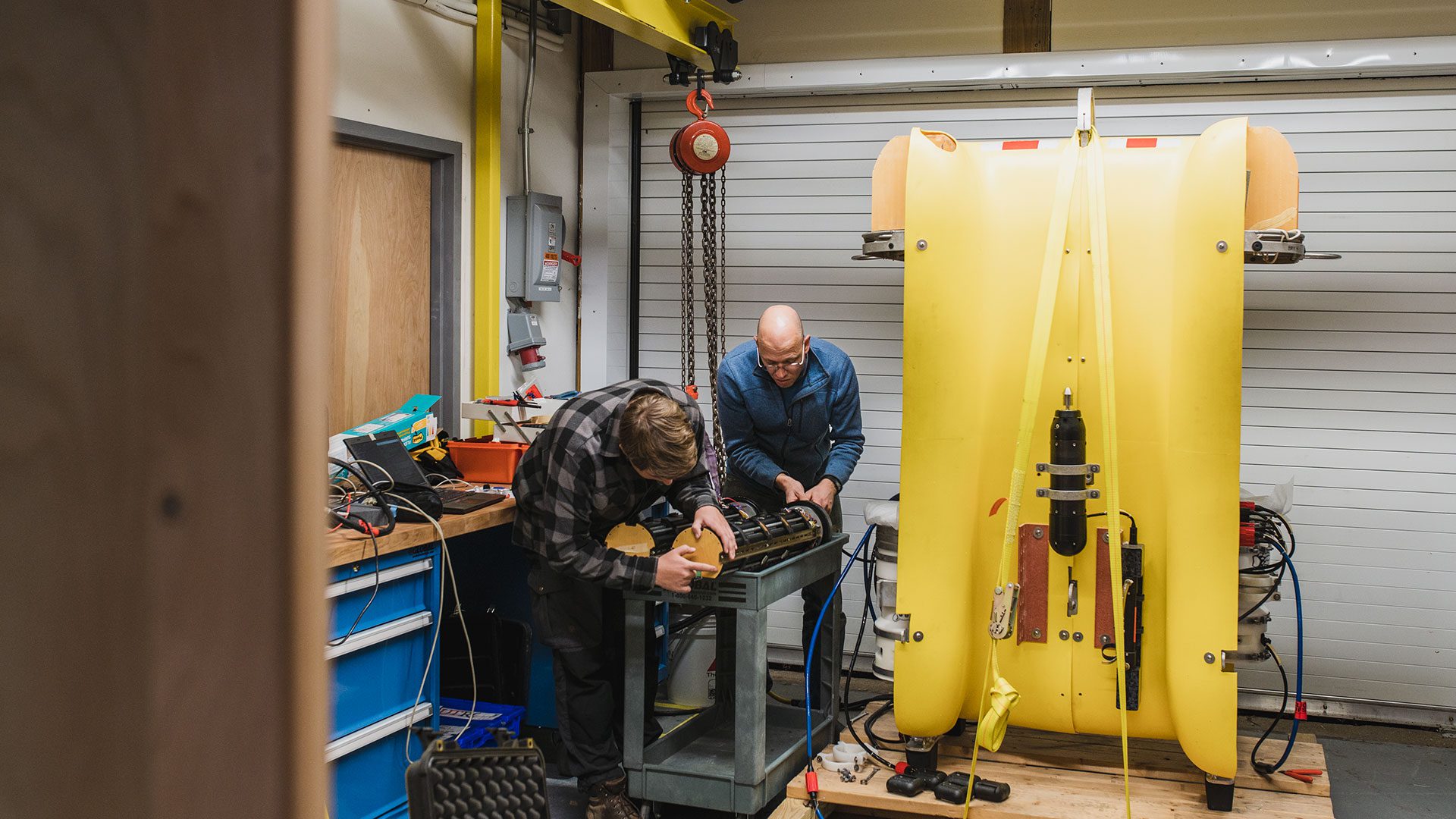
WHOI engineers Mike Jakuba and Victor Naklicki inspect a battery pack while working on autonomous vehicle Clio, a robot designed for deep-ocean mapping and biochemical sampling. (Photo by Daniel Hentz, © Woods Hole Oceanographic Institution)
“Gliders have been a very successful platform for collecting profiles of salinity, temperature, and other things in the water column,” Jakuba says. “But if we had more precision navigation, it would open up new possibilities.”
Gliders could, for example, be sent out to survey the seafloor to identify the locations of methane seeps or hydrothermal vents. Researchers are still studying how these seafloor phenomena and the unique ecosystems around them affect ocean chemistry and circulation, and understanding their quantity and locations could help improve ocean models and climate predictions.
The researchers have created an extremely low-power navigation system for ocean gliders by pairing them with an autonomous surface vessel called a wave glider. The wave glider, which is powered by wave and solar energy, broadcasts a simple acoustic signal under the water and the ocean gliders use that to determine where they are in the water column.
“If you want to move the ocean glider on the bottom, you would move the wave glider—it follows like a dog on a leash,” Jakuba says. “It speaks to this vision of longer-term robots working in parallel with one another in a scalable system, getting away from the model of needing a ship.”
Empowering communities
Closer to shore, volunteers often lead water quality monitoring efforts, collecting samples by hand. As robotic technologies become less expensive and more commercially available, coastal communities may be able to build simple ocean robots to get a better idea of what’s going on in their own backyard. Over the past four years, Jakuba has been working with a local high school student, Patrick McGuire, to design and build an inexpensive coastal profiling float known as the TideRider that can monitor changing ocean conditions.
Climate change is warming the waters of Cape Cod Bay, shifting seasonal patterns and allowing new species of phytoplankton to bloom and decompose, potentially causing deadly low-oxygen zones along the bottom. One such event occurred in September of 2019, when fishermen in southern Cape Cod Bay started hauling up trap after trap of dead lobsters. A blob of hypoxic water—water with very little oxygen—had formed along the bottom of the bay and any animal that couldn’t escape it had suffocated. If the fishermen had known about the hypoxic water, they could have placed their traps in other areas.
The TideRider was originally designed to help aid in the public understanding of the coastal ocean and to foster a sense of stewardship, but a small fleet of them could also provide continuous data throughout the bay, forming the basis of an alert system for changing conditions. They can be programmed over cell networks to move between the seafloor and the surface, using favorable tides to drift to new locations. And, the instrument costs less than $1,000 to build and can carry sensors to detect dissolved oxygen levels or other water quality data.
“What we’re imagining is a hypoxia alert system where the TideRider would sit on the seafloor and if the oxygen dips below the level where it’s going to cause fish kills, for example, then it would come to the surface and at least warn you,” Jakuba says.
Robots as emergency responders
When the Deepwater Horizon oil rig exploded in April of 2010, millions of gallons of oil began gushing out of a damaged seafloor well in the Gulf of Mexico. In the months that followed, as cleanup workers tried to contain and disperse the spill, robots were sent down to survey the damage and help track the currents that would spread the plume of oil. Although they were the best available instruments for the job, none of them had been designed with this sort of emergency in mind. In the years that followed, government agencies and researchers started considering better tools to respond to oil spills.


The importance of this has only grown as shipping traffic expands in the Arctic and melting ice opens potential new routes for commercial vessels. An oil spill in the Arctic, where resources are scarce and oil may be moving under ice, could be disastrous.
“Previously, if we got a call that there was a ship that hit an iceberg in northern Alaska waters, we wouldn’t get there quickly,” says Amy Kukulya, a research engineer at WHOI. “There were no assets around to be able to respond to the oil spill.” Kukulya is working with collaborators at WHOI and the Monterey Bay Aquarium Research Institute (MBARI) to address this issue. They have been designing and testing a Long-Range AUV, or LRAUV, that can be deployed quickly—via helicopter, if necessary—to track and collect data on oil spills or other environmental hazards. The propeller-driven cylindrical robot can sniff out dissolved hydrocarbons (evidence of an oil spill) and other environmental anomalies under ice and stay out for more than two weeks at a time, helping emergency responders determine where a hazard is headed and how cleanup efforts should be deployed.

“We’ve been working on reliability, software, intelligence, and endurance,” Kukulya says. “And the idea of being able to recharge once you get your robot to the Arctic.”
One possibility is to allow robots to recharge at underwater docking stations, either on a mooring in the ice or something anchored to the seafloor. After a mission, an AUV could return to its dock and attach itself to recharge before heading out again. A dock could even hold multiple LRAUVs intended to work together as a survey fleet. The researchers have already developed docks that allow the robots to wait for retrieval or further instructions, but current versions do not include the ability to recharge the robots yet. Kukulya says that capability will be a critical addition down the line.
Kukulya and her colleagues are also investigating the possibility of using multiple types of robots in tandem. An AUV could survey under the water while a drone spots oil slicks from the air, with a sea-surface robot facilitating communication between the two.
The LRAUV is already an impressively flexible platform. It has several modes of movement, including hovering in place, swimming through the water column like a glider, and conducting lawnmower-style surveys. The researchers can turn various sensors on and off to save battery life. When searching for a sunken ship leaking oil, for example, the vehicle might start with only its hydrocarbon sensor on. Once it picks up a trail, it might turn on a sensor that could take samples or turn on a camera to collect images.
By building these options into a rapid-response tool, the researchers have made it simple to change mission parameters on-the-fly. When a nor’easter rolled in while the LRAUV was surveying a shipwreck, instead of packing up and going home, Kukulya and her team switched on a new set of sensors and collected a storms-worth of data about air-sea interactions instead. It’s a platform that could be used to track harmful algal blooms—which contain toxins that can make
people and animals sick—map undersea salinity fronts that affect commercial fisheries, or study any number of other ocean anomalies.
“I’m really excited to have some measurable impact and collect the kind of baseline data that people can learn from and then directly apply,” Kukulya says. “If we can prove that vehicles are reliable and we can run them without much overhead, and we can use the data they send back to shore to make informed decisions, then we can start to get more and more people interested in and investing in ocean technology.”
Working smarter, not harder
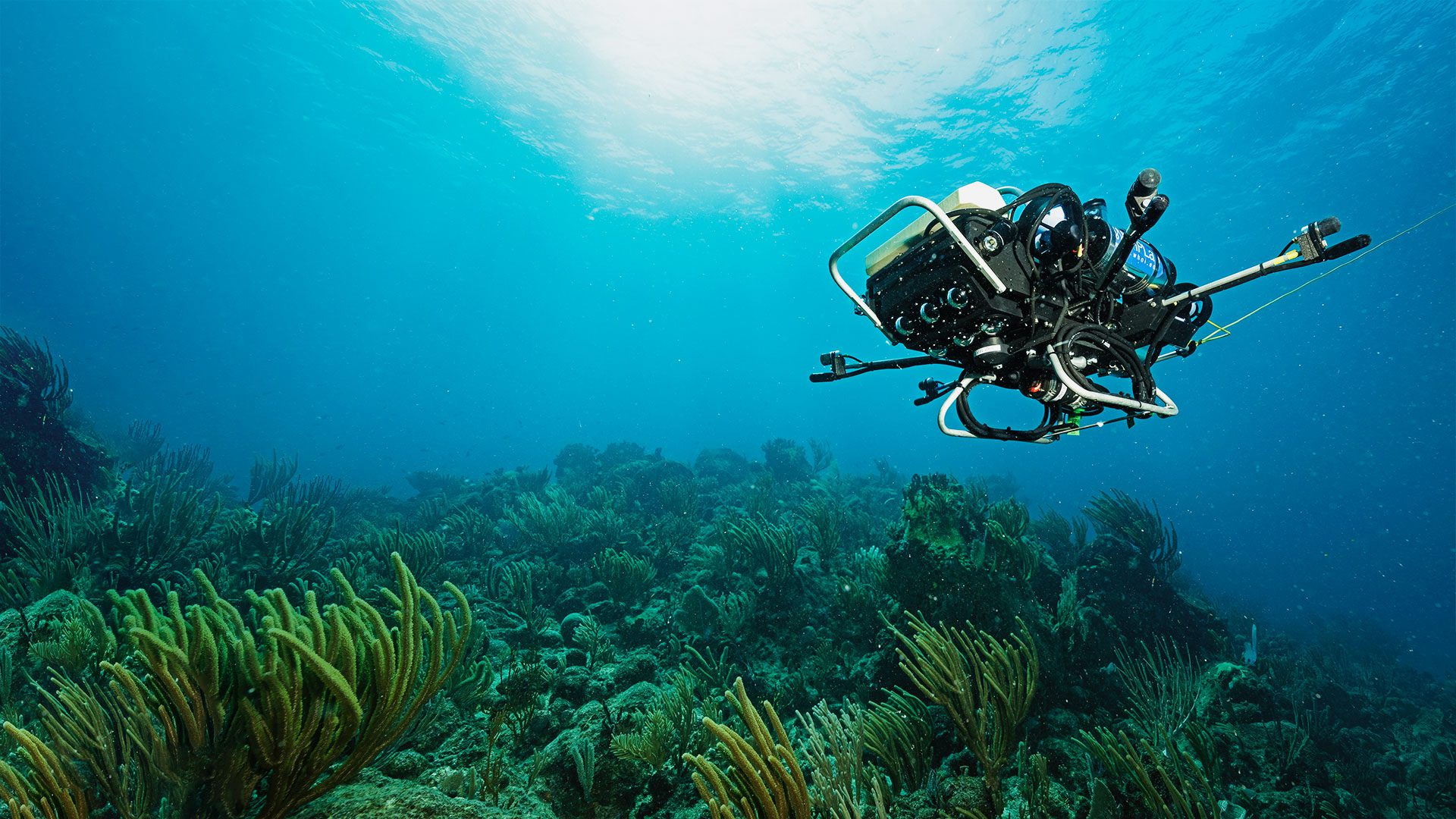
Hovering above the fragile and complex terrain of a coral reef, CUREE (Curious Underwater Robot for Ecosystem Exploration) focuses its front-facing cameras on a barracuda. The fish glides easily through the water, crossing a sandy patch and touring another group of corals before returning to float, mouth open, at a cleaning station where small fish will pick parasites and dead tissue from its teeth. Throughout the route, CUREE follows, occasionally losing track of the silvery shape but always finding it again.
“We have been able to follow things like barracudas, stingrays, and some other smaller animals like triggerfish and jacks visually, without any tags,” says Yogi Girdhar, an associate scientist at WHOI. “We can’t follow everything, yet—it’s a very difficult problem to follow things around, especially in a coral reef.”
Girdhar wants to use this technology, which was developed in his lab by MIT-WHOI Joint Program student Levi Cai, to guide reef restoration efforts. Changes in animal behavior could be an early indicator that a reef is damaged or stressed. Or, if species return to their usual patterns, it could show that coral planting efforts have successfully restored an ecosystem’s function, not just its appearance.
“The goal should be to restore a reef to something like a rich, old-growth forest environment,” Girdhar says. “We can use artificial intelligence to discover patterns in how these species are interacting with the environment, and identify how these patterns change with external influences like climate change or pollution or invasive species.”

But teaching a robot to follow fish around is tricky. The robot has to be able to think on its own—avoiding obstacles, finding the right angle to approach without spooking an animal, deciding how close is too close, and keeping track of a moving shape through a dynamic environment. It’s a task that requires the kind of artificial intelligence that most ocean robots don’t have.
“If we can nail this technology, it’ll be a game changer for how we understand not just marine animals and their behavior, but also the ecosystem they’re in,” Girdhar says.
Tracking individual animals is just one aspect of Girdhar’s work to turn CUREE into a full-fledged scientific partner. He is also training the robot to identify and monitor biodiversity hotspots on a reef for more accurate surveys and to seek out rare phenomena, the kinds of unexpected discoveries that researchers sometimes stumble on, and investigate them the way any curious scientist would.
“There’s a lot of potential for artificial intelligence to make breakthroughs, helping ocean scientists model and understand these ecosystems in different ways,” Girdhar says. “And that can help us with restoration efforts.”
While a fully intelligent, curious, autonomous robot would be the ultimate scientific partner, even small amounts of intelligent decision-making could make robots more effective explorers. Orpheus, the first of a new class of AUVs at WHOI that can land and take samples in the deepest parts of the ocean, isn’t currently doing much thinking on its own. But the researchers have plans to make the robot increasingly independent. The first steps in that process will be to program Orpheus to change its behavior when its sensors detect whatever the researchers are interested in (akin to the LRAUV following the scent of hydrocarbons), but eventually Orpheus will be able to make simple judgement calls based on what it sees.
“The five-to-ten-year vision is to start working on image processing,” says Casey Machado, a research engineer at WHOI and one of Orpheus’ designers. “Since we already have all of the computer smarts and the data pipelines in the vehicle to look at images and be able to analyze them, we can start to teach Orpheus to be smarter about how it uses that information.”
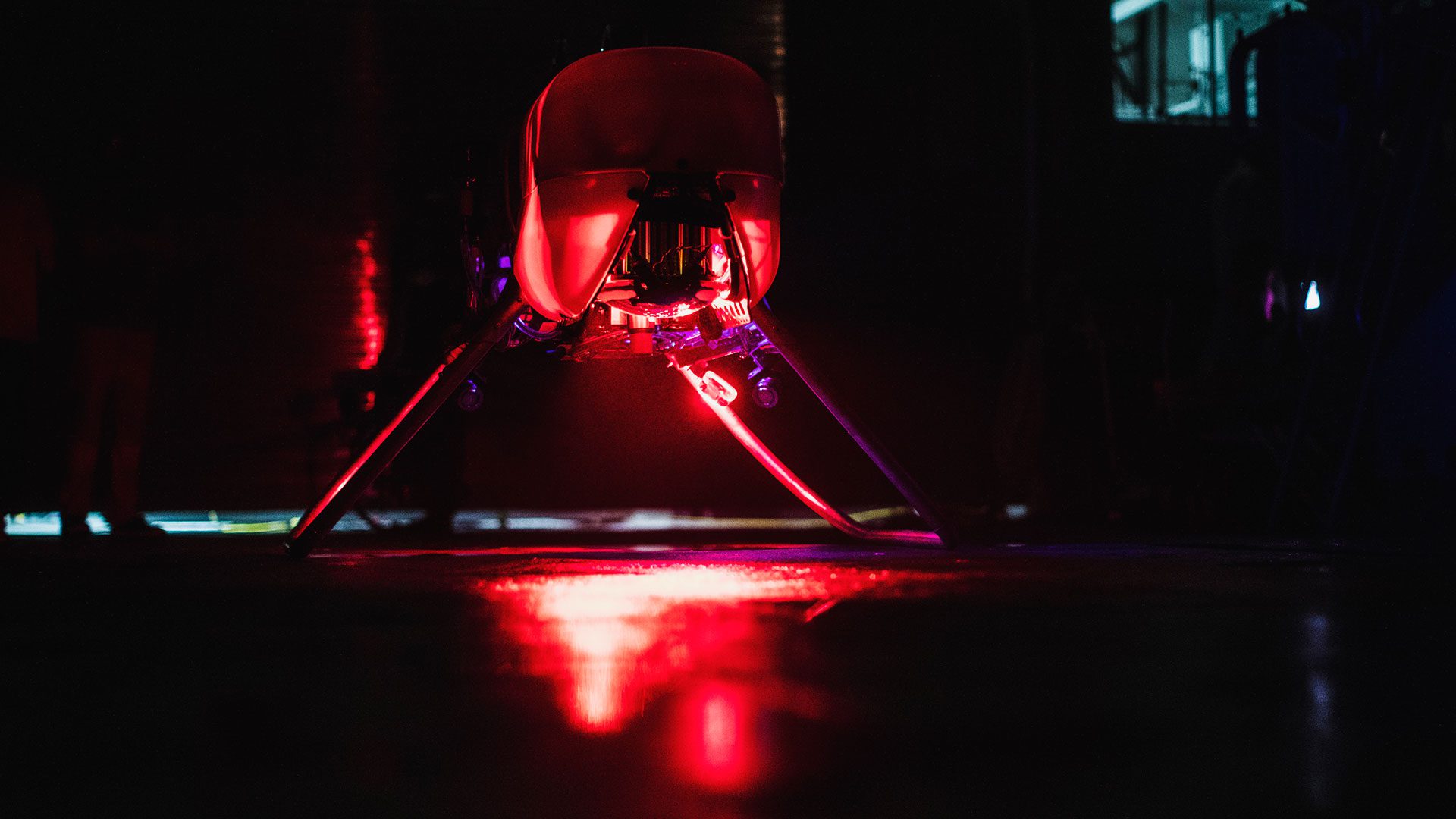
AUV Orpheus sits on the deck of OceanX’s M/V Alucia during a mission in 2018. (Photo by Luis Lamar, © Woods Hole Oceanographic Institution)
If Orpheus was sent to take a sediment core sample of the seafloor, for example, the robot could use the images it recorded to determine whether the sediment was too rocky to take a core where it was originally sent. The robot could move slightly and try again, saving a trip to the surface with an empty core barrel.
Orpheus was built to be a portable, affordable, and flexible platform. The robot can be flown where it’s needed and launched from a small research vessel. Right now, there are two Orpheus AUVs (named Orpheus and Eurydice), but the hope is to have a small fleet of them that can be chartered for deep-sea scientific missions or helping small countries explore and understand their own waters. Adding levels of autonomy will only make it more capable.
Of course, it’s always good to have an analog backup plan, Machado says. On one of Orpheus’ test dives, the vehicle ran through its battery life faster than expected and stopped responding. Fortunately, the engineers simply had to wait—weights on the bottom of Orpheus were secured with metal clips intended to corrode away in salt water. After a few hours, the weights dropped and Orpheus bobbed cheerfully backed to the surface for recovery.
“Literally everything else had gone wrong,” Machado says. “But you can always count on the laws of physics applying and corrosion working.”
An internet of the ocean
Any individual robot can only do so much. Like any individual scientist, it can only be in one place at a time, but when it shares information and collaborates, it can achieve much more. As we confront the climate crisis, we will need the combined power of all the robotic technologies researchers have been developing.
The ocean stores a large portion of the excess carbon dioxide we have produced by the burning of fossil fuels, and it may be able to hold more, helping to slow the effects of climate change while we transition to renewable energies. WHOI is working to design a large-scale, full-depth, high-resolution network of robots and sensors in the North Atlantic to monitor ocean changes and track carbon in the ocean and atmosphere. The Ocean Vital Signs Network (OSVN), which would cover roughly one million square kilometers of ocean, would function as a test-bed to study the potential efficacy and impacts of ocean-based carbon dioxide removal (CDR) efforts.
“It makes no sense at all to pursue CDR if you can’t prove that it works,” said Peter de Menocal, president and director of WHOI, during a TEDx talk in Boston. “This Ocean Vital Signs Network, this internet of the ocean, allows us to do that.”
Many of the technologies necessary to find, evaluate, and deploy climate solutions already exist, or are in development. But refining and implementing them at the necessary scale will require partnerships between governments, industry, philanthropy, and multiple research organizations. The Ocean and Climate Innovation Accelerator (OCIA) consortium, launched by WHOI and Analog Devices, Inc. in 2021, is laying out a roadmap for what these cross-industry partnerships could look like.
“We recognized the collective combination of Analog Devices, Inc., Woods Hole Oceanographic Institution, and other like-minded industry players can help us all accelerate the pace of innovation necessary for finding climate solutions,” says Dan Leibholz, chief technology officer for Analog Devices, Inc. “We are on a mission to create a ‘solutions engine’ that leverages people, projects, and places to respond to a wide range of urgent climate challenges, and mobilizes science and engineering brainpower to solve them.”
The consortium is supporting projects that will advance ocean sensing, optimize technology development, tackle large-scale data processing and lead to real-world impacts—all the developments that ocean robots need to effectively tackle climate change.
“We live on an ocean planet, so it should come as no surprise that understanding the ocean is going to be key for climate solutions,” de Menocal said. “We have a responsibility and an opportunity to revolutionize our understanding of the oceans and to drive new understanding that’s going to help us lead these solutions.”