
To answer questions about our climate and the origins of life on Earth, marine scientists often rely on robots that can explore the deepest trenches of the global ocean. But in order to do so, these robots need to withstand extreme pressure. Thankfully, advancements in ocean engineering are allowing robots to go deeper than ever before—thanks in large part to a bit of physics and some key pieces of technology.
At the average ocean seafloor depth of 3,800 meters (2.4 miles) the force from the water above (called hydrostatic pressure) is 380-times the pressure of the atmosphere at sea level. That’s the equivalent weight of one adult rhino pressing down on you from every angle imaginable. At such depths, any enclosed space needs to be built to resist this crushing force or risk collapsing in on itself. In humans, these spaces include our lungs, our head, and our body cavity, while in robots, enclosed spaces may include flotation, housings for electronics such as scientific sensors and computers, and batteries. But while human bodies cannot be modified to withstand such conditions, ocean robots can.


To protect vital components from intense pressure, such as a robot’s computer brain, engineers often enclose them in spherical or cylindrical pressure housings. This is because circular shapes evenly distribute the water’s pressure over their entire area, whereas shapes with sharp edges (e.g. cubes or pyramids) concentrate stress at those points, increasing the risk of implosion. To ensure the pressure-resistance of these housings, engineers must also use strong materials. But there’s usually a tradeoff: the stronger the housing, the heavier the robot. And heavier robots require greater buoyancy, which can make it awkward and more cumbersome for them move at depth, and cause battery life to drain more quickly.
Traditionally, engineers have solved this problem by relying on flotation devices that compensate for increased weight, allowing heavy robots to still float. The famed submarine Trieste, which was the first to dive the deepest point in the ocean, Challenger Deep in the Mariana Trench, got its buoyancy from a huge tank of gasoline sitting on top of a steel sphere that housed the robot’s pilots—similar in design to a blimp. The gasoline created an internal atmosphere that kept the submarine from collapsing under pressure. And since gasoline is less dense than water, it ensured the vehicle would be buoyant enough to move freely. Big tanks, however, are not ideal for maneuvering along the dark, unknown topography of the seafloor, which ocean robots often need to do.
To avoid such bulk, many engineers today opt for a material called syntactic foam. It features a mixture of glue-like epoxy and hollow microscopic glass spheres. The hollow spheres lower the density of the foam, making it lighter than water and creating buoyancy, while the glue provides strength and durability to hold its shape. Syntactic foam can be shaped into any form, allowing ocean robots to move in a streamlined manner.

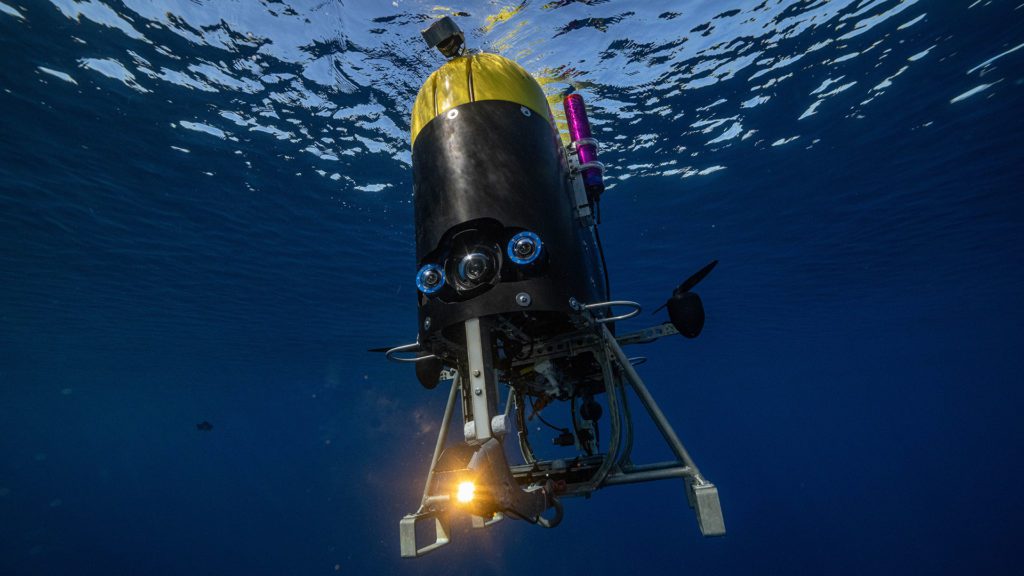
AUV Orpheus sits on the seafloor. (Photo by Luis Lamar, © Woods Hole Oceanographic Institution)
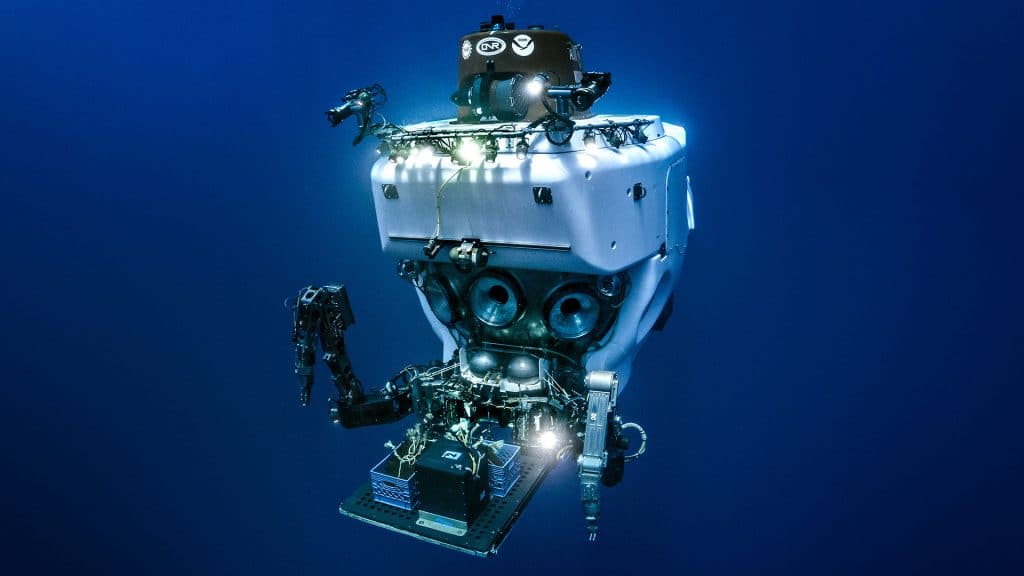
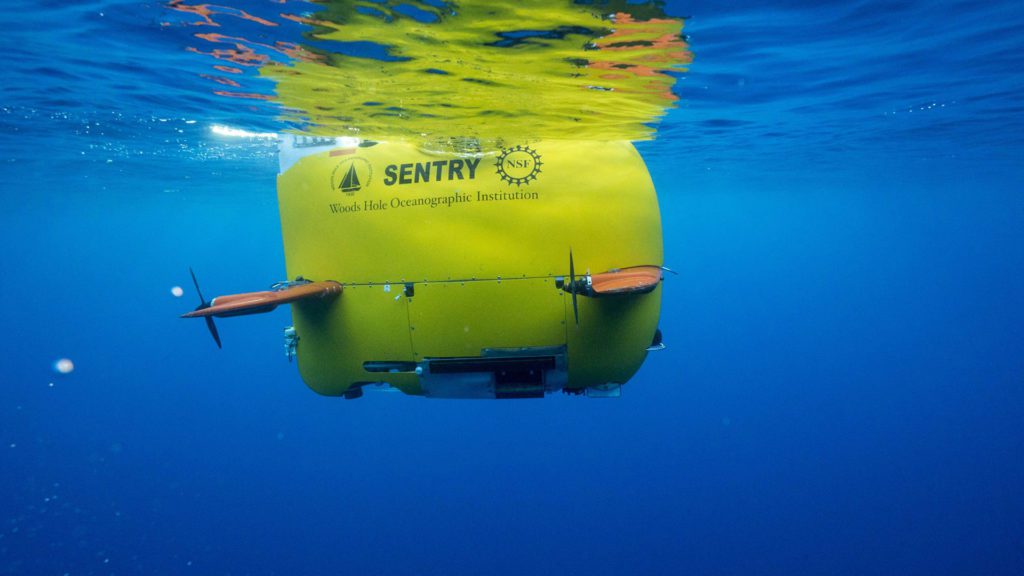
This material is widely used in ocean robots across the oceanographic community. At WHOI, it can be found on the bodies of robots like remotely-operated vehicle (ROV) Jason, autonomous underwater vehicles (AUV) Mesobot and Sentry, and human-occupied vehicle (HOV) Alvin. Some, like AUV Orpheus, use a combination of syntactic foam and flotation spheres to ensure the vehicle can maintain buoyancy in extremely deep ocean environments.
Still, there is never zero risk of pressure-related failures. At depth, metal components, such as a robot's frame, can flex and move. Over time this can stress and wear down syntactic foam where it connects to these parts. Engineers manage this with routine vehicle inspections between dives, replacing the syntactic foam pieces or flotation if damage is discovered.
LEARN MORE
Underwater Vehicles
Oceanographic observing tools has grown to include human-occupied submersibles, remote-controlled vehicles, and autonomous robots.
AUVs
AUVs are programmable, robotic vehicles that, depending on their design, can drift, drive, or glide through the ocean without real-time control by human operators.
» Mesobot
» REMUS
» SeaBED
» Sentry
» Spray Glider
» Slocum Glider
Engineered Syntactic Systems. “A History of Syntactic Foam - Part 1.” Engineered Syntactic Systems, Admin https://Esyntactic.com/Wp-Content/Uploads/2021/05/Final-Version-ESS-Logo-Long-Version-002-300x176.Png, 22 June 2016, https://esyntactic.com/a-history-of-syntactic-foam-part-1/.
“What Is Syntactic Foam?” Engineered Syntactic Systems, 8 Dec. 2015, https://esyntactic.com/products-solutions/what-is-syntactic-foam/#:~:text=Syntactic%20foam%20is%20a%20class,provided%20by%20the%20hollow%20spheres.
NOAA. “Remotely Operated Vehicles.” Exploration Tools: ROVs: NOAA Office of Ocean Exploration and Research, https://oceanexplorer.noaa.gov/technology/subs/rovs/rovs.html.
Robinson, Bruce H. “The Coevolution of Undersea Vehicles and Deep-Sea Research.” Marine Technology Society. Marine Technology Society Journal, vol. 33, no. 4, 1999, https://doi.org/https://www.proquest.com/docview/211745366?fromopenview=true&pq-origsite=gscholar&parentSessionId=%2BuhtwOlANhzAVwgm%2FnE59AqXYYGg0WBU7yep1DvVT10%3D.
Woods Hole Oceanographic Institution. “Why Is Pressure Different in the Ocean?” Woods Hole Oceanographic Institution, 2 May 2022, https://www.whoi.edu/know-your-ocean/did-you-know/why-is-pressure-different-in-the-ocean/.
“Underwater Vehicles.” Woods Hole Oceanographic Institution, 6 Feb. 2019, https://www.whoi.edu/know-your-ocean/ocean-topics/ocean-tech/underwater-vehicles/.
DIVE INTO MORE OCEAN FACTS

How are seashells made?
One of the most striking features of our beaches is seashells. Their whorls, curves, and shiny iridescent insides are the remains of animals. But where do they come from?

How does ocean warming affect fisheries?
The ocean has absorbed 93% of excess heat from human activities, raising its temperature by 1.5°F since 1901. Warming oceans impact fish migration, leading to conflicts and overfishing.
What are ocean robots?
From the icy poles to sensitive coral reefs, robots empower us to understand more of the ocean than ever before. But just what are they?

How does the ocean affect storms?
Under the right conditions, some of those storms can grow into large tropical storms. Or even monstrous hurricanes.