Ocean Topics


Knorr has traveled thousands of miles in the world's oceans to conduct oceanographic research in biology, chemistry, geology and geophysics, physical oceanography, and ocean engineering. It is equipped with a dynamic positioning system capable of maintaining a precise position on the sea surface and other sophisticated navigation and communication equipment, and can accommodate a wide variety of scientific projects. (©Woods Hole Oceanographic Institution)
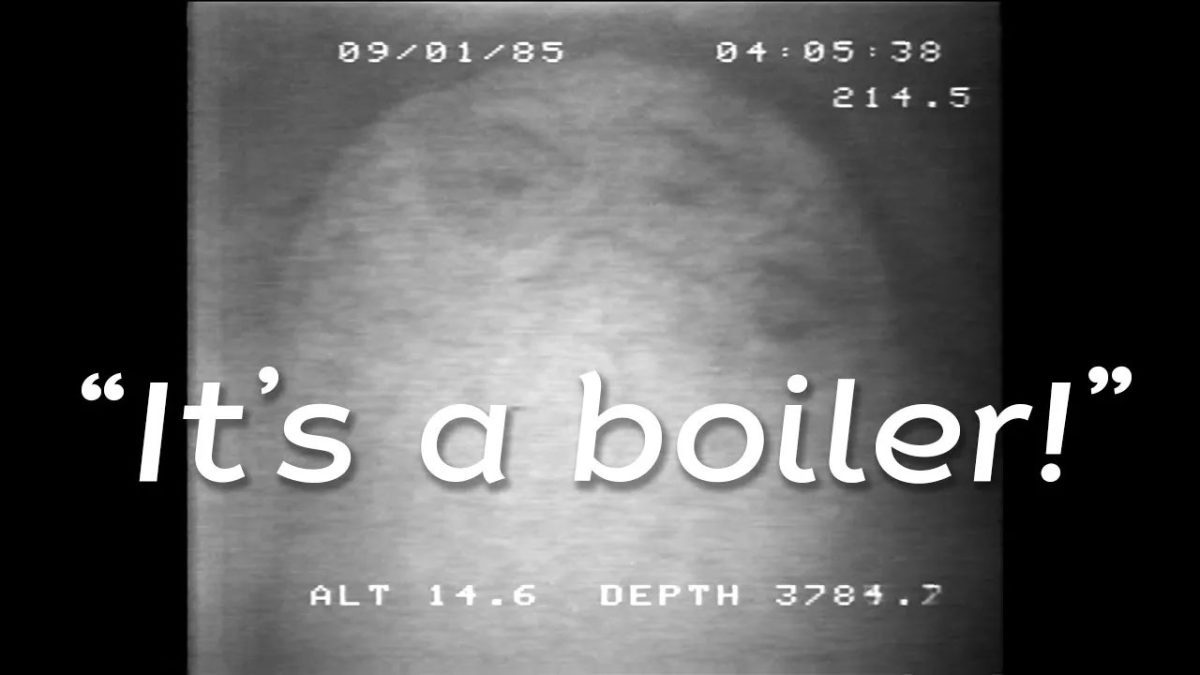
The wreck of Titanic was located in 1985 by the Woods Hole Oceanographic Institution’s new imaging vehicle Argo on its first deep-sea cruise, towed from the Research Vessel Knorr. The wreck was then extensively photographed by the veteran 35-mm camera system ANGUS (Acoustically Navigated Geological Underwater Survey), which took the many "blue" pictures of the wreck seen in media coverage.
When the Institution returned to the Titanic in 1986, another ship and a new set of vehicles were brought in to explore the wreck. The Research Vessel Atlantis II served as the operations center for the three-person submersible Alvin, the remotely operated vehicle Jason Jr., and the towed imaging sled ANGUS. ANGUS was the only vehicle used in both expeditions.
Built by Defoe Shipbuilding Corporation in Bay City, Michigan, the 245-foot Knorr was launched in 1968 and delivered to WHOI on April 15, 1970. The ship was lengthened 34 feet and completely overhauled in 1991, and is now 279 feet, making it one of the largest ships in the US academic research fleet. WHOI has operated the ship since it was built; its officers and crew are U.S. Coast Guard certified merchant marine but are civilian employees of the Institution.
Knorr has traveled thousands of miles in the world's oceans to conduct oceanographic research in biology, chemistry, geology and geophysics, physical oceanography, and ocean engineering. It is equipped with a dynamic positioning system capable of maintaining a precise position on the sea surface and other sophisticated navigation and communication equipment, and can accommodate a wide variety of scientific projects.
The ship has spent much of its recent career pursuing climate studies around the world. In 1974, Bob Ballard, then a graduate student, and other scientists sailed aboard Knorr during an historic scientific expedition known as Project FAMOUS (French American Mid-Ocean Undersea Study) that confirmed the theory of plate tectonics and continental drift on an expedition to the Mid-Atlantic Ridge in the North Atlantic. The Institution’s Deep Submergence Vehicle Alvin and the towed imaging sled ANGUS also participated in that historic expedition.
Knorr is named after Ernest R. Knorr, a distinguished early hydrographic engineer and cartographer, who was appointed senior civilian and Chief Engineer Cartographer of the U.S. Navy Hydrographic Office in 1860. Mr. Knorr was largely responsible for the success of the Navy's first systematic charting and surveying effort from 1860 to 1885.
Today, Knorr continues to conduct research worldwide for the American ocean research community. The Titanic discovery, however, remains one of its proudest moments.
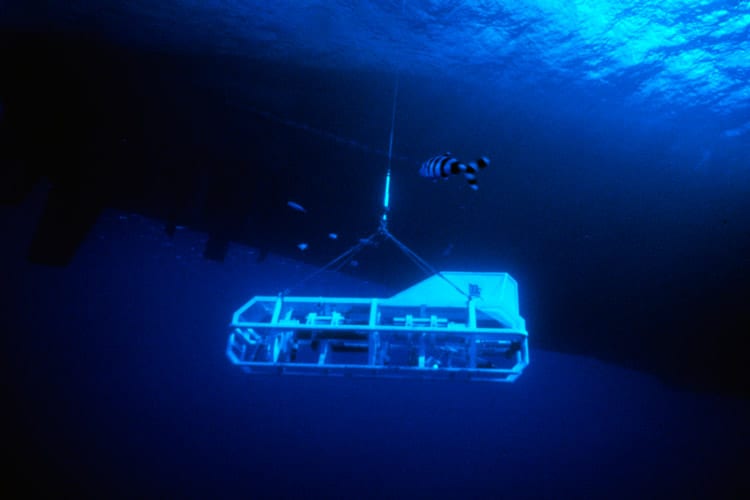
Argo, the system of television cameras and sonars that helped find the Titanic, was named by Titanic expedition leader Robert Ballard for the mythical Greek vessel that carried Jason on his quest for the Golden Fleece. In 1985, Argo represented a new generation of exploration vehicles for ocean scientists. (©Woods Hole Oceanographic Institution)
Argo
Argo, the system of television cameras and sonars that helped find the Titanic, was named by Titanic expedition leader Robert Ballard for the mythical Greek vessel that carried Jason on his quest for the Golden Fleece. In 1985, Argo represented a new generation of exploration vehicles for ocean scientists.
Argo was developed at the Woods Hole Oceanographic Institution with funds provided by the Office of Naval Research as part of a dual vehicle Argo/Jason system for ocean bottom research. It could acquire wide-angle film and television pictures while flying 50 to 100 feet above the sea floor, towed from a surface vessel, and could also zoom in for detailed views.
Unmanned or tethered systems like Argo can operate 24 hours a day, doing the basic reconnaissance necessary for Jason or other towed systems or human exploration in research submersibles like the Deep Submergence Vehicle Alvin, operated by the Woods Hole Oceanographic Institution and owned by the U.S. Navy.
Argo was designed to operate in the rugged terrain of undersea mountain ranges. The towed sled, capable of operating depths of 6,000 meters (20,000 feet), meant 98% of the ocean floor was within reach. The original Argo used to find Titanic was 15 feet long, 3.5 feet tall, and 3.5 feet wide and weighed about 4,000 pounds in air. It had an array of cameras looking forward and down, and strobes and incandescent lighting to illuminate the ocean floor.
This new tool, built largely with commercially available components and specially developed software and cable systems, was designed to enhance our ability to explore the ocean floor. Dr. Robert Ballard, leader of the Deep Submergence Laboratory which developed Argo, is a geologist who spent most of his 30-year research career at WHOI investigating the Mid-Ocean Ridge, the largest single feature on earth's surface, some 45,000 miles long and covering more than 20 percent of the globe. Since the first detailed exploration of the Mid-Atlantic Ridge, part of the system of ridges that make up the Mid-Ocean Ridge, began in 1973 (and in which Dr. Ballard was a participant), scientists had managed by 1985 to accumulate only 120 miles of data in 12 years. In the first scheduled scientific use of Argo in December 1985, Ballard and his colleagues covered nearly 120 miles of the East Pacific Rise in just 20 days.
With its enhanced images and ability to operate in the dangerous undersea mountain ranges, Argo found many more uses. Geologists and geophysicists were able to explore large areas and inspect smaller features at a closer range. Biologists conducted surveys of seafloor populations. Geochemists used Argo for studies in the hydrothermal vents where chemicals spew forth from deep within the earth to support unique forms of marine life.
Argo made another historic discovery in June 1989 when it located the sunken World War II German battleship Bismarck in nearly 15,000 feet of water off the coast of France. In 1985, plans called for Argo to carry Jason, a robotic vehicle under development by the Institution’s Deep Submergence Laboratory, to inspect seafloor features close-up and collect samples with a manipulator. At-sea tests with Jason in 1989 altered that plan, and the two vehicles are now used separately. The original Argo was retired in the 1990s. Today, the Institution has improved on this technology, and uses several uniquely designed towed vehicles for oceanographic missions across the globe.

ANGUS was the first unmanned search and survey system developed by the Woods Hole Oceanographic Institution in the mid 1970s, and was the only vehicle to be used on both the 1985 and 1986 Titanic expeditions. ANGUS was designed to work primarily in rugged volcanic terrain to depths of 20,000 feet, within reach of 98% of the ocean floor. As a result, its various subsystems are mounted within a heavy-duty steel frame capable of withstanding a jarring and head-on collision with vertical outcrops of rock. (©Woods Hole Oceanographic Institution)
ANGUS
ANGUS, or Acoustically Navigated Geological Underwater Survey, was the first unmanned search and survey system developed by the Woods Hole Oceanographic Institution in the 1970s. It was designed to work primarily in extremely rugged volcanic terrain to depths of 20,000 feet, within reach of 98 percent of the ocean floor.
As a result, its various subsystems were mounted within a heavy-duty steel frame capable of withstanding a jarring head-on collision with vertical outcrops of rock. During its long career ANGUS made more than 250 voyages before it was retired in the late 1980s. It's motto: "Takes a lickin but keeps on clickin."
Unlike many other survey systems at the time, ANGUS maintained continuous visual contact with the seabed, flying 30 to 50 feet above the bottom. Contained within its 12-foot-long frame were three large-capacity 35-mm color cameras, each having 400 feet of film (a total of 3,200 photos on a single lowering). Each camera had a different focal length lens, and collectively the three cameras photograph a swath of sea floor 200 feet in width.
Mounted next to the cameras was a temperature measurement system that transmitted the temperature of the water through which the sled was passing to the surface. Also on the frame was a down-looking sonar which sent to the surface the height of the sled above the bottom, permitting the person "flying" or maneuvering the vehicle aboard ship to maintain the desired flying altitude by letting cable out or reeling it in.
Strobe lights used to illuminate the bottom permit ANGUS to be flown higher and to "see" further than conventional deep-sea photo systems. Large area photos are typically taken at 20-second intervals providing a generous photo overlap.
ANGUS was used on a standard 1/2-inch trawl wire found on most oceanographic ships and was a highly portable system in sea-going containers. Once a lowering had been completed, generally 12 hours or so, the film was processed aboard ship using warm sea water for analysis within four hours. Such a quick turnaround time permitted the scientists to monitor the survey in progress and modify their track lines accordingly.
ANGUS was the only vehicle used in both the discovery expedition in 1985, and the return mission to the Titanic in 1986.

The Research Vessel Atlantis II served as the operations center for the three-person submersible Alvin, the remotely operated vehicle Jason Jr., and the towed imaging sled ANGUS. (©Woods Hole Oceanographic Institution)
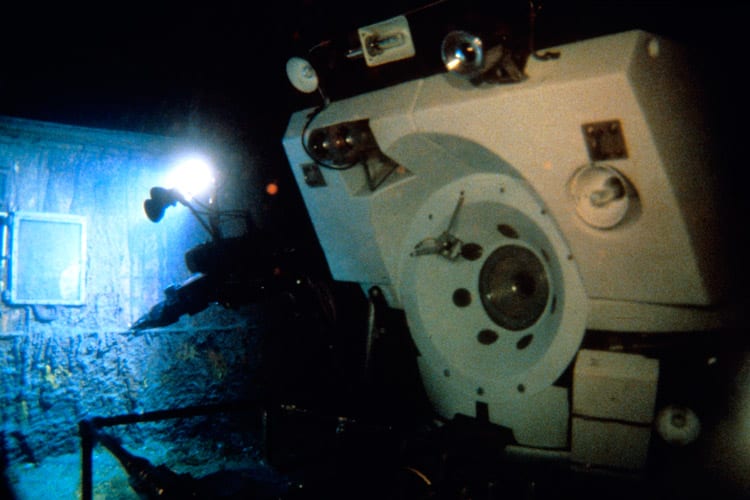
DSV Alvin on deck of RMS Titanic, taken from ROV Jason Jr. In Alvin, a typical eight-hour dive takes two scientists and a pilot as deep as 4,500 meters (14,764 feet). When working at maximum depth, it takes about two hours for the submersible to reach the seafloor and another two to return to the surface. The four hours of working time on the bottom are crammed with carefully planned photography, sampling, and experiments conducted by the scientists using three 12-inch diameter viewports. The submersible's most famous exploits include locating a hydrogen bomb accidentally dropped into the Mediterranean Sea in 1966, exploring deep-sea hydrothermal vents discovered in 1977, and surveying the sunken ocean liner Titanic in 1986. (©Woods Hole Oceanographic Institution)
Human Occupied Vehicle (HOV) Alvin
Woods Hole Oceanographic Institution operates the Deep Submergence Vehicle (DSV) Alvin as part of the U.S. National Deep Submergence Facility.
A typical eight-hour dive takes two scientists and a pilot as deep as 4,500 meters (14,764 feet). When working at maximum depth, it takes about two hours for the submersible to reach the seafloor and another two to return to the surface. The four hours of working time on the bottom are crammed with carefully planned photography, sampling, and experiments conducted by the scientists using three 12-inch diameter viewports.
Alvin can hover, maneuver in rugged topography, or rest on the bottom. Typically, four video cameras are mounted on the sub's exterior. Because there is no light in the deep sea, the submersible carries special lights to illuminate the bottom. Two hydraulic, robotic arms may be used to manipulate sampling and experimental gear. A sample basket mounted on the front of the submersible can carry a variety of instruments. Scientists can load up to 1,000 pounds of their own gear that may include sediment corers, temperature probes, water samplers, and biological sample pumps.
Alvin has made more 4,000 dives for a wide variety of scientific endeavors. The submersible's most famous exploits include locating a hydrogen bomb accidentally dropped into the Mediterranean Sea in 1966, exploring deep-sea hydrothermal vents in 1979, and surveying the sunken ocean liner Titanic in 1986.

Jason Jr., seen here peering into an RMS Titanic stateroom, was a small remotely operated prototype vehicle of the larger Jason. Jason Jr. was used during this mission to conduct test dives as part of the continuing development of the lab’s Argo/Jason imaging system, designed for scientific missions to explore and photograph the deep sea floor. (©Woods Hole Oceanographic Institution)
Jason Junior
Jason Junior, also called JJ, was a small Remotely Operated Vehicle (ROV) designed and built by the WHOI Deep Submergence Laboratory as a prototype for a larger and more capable ROV to be named Jason, being developed as part of the Argo/Jason system. Its first mission was exploration of the wreck of Titanic in 1986, during which it was attached to Alvin by a 300-foot fiber optic cable. Scientists were able to explore places Alvin could not fit and got some amazing pictures. When not in use, JJ was tucked in a metal garage on the front of Alvin. JJ was controlled remotely by a pilot inside Alvin through the fiber optic cable.
Jason Jr. had several successful missions after the Titanic cruise. In late 1991 it was lost at sea when a barge carrying equipment to the Galápagos Islands sank in the Pacific. The larger more capable Jason vehicle was in operation by then and replaced Jason Jr.