
New Robot Sub Surveys the Deep off the Pacific Northwest
August 8, 2008
Scientists and engineers from the Woods Hole Oceanographic Institution (WHOI) and the University of Washington (UW) have successfully completed the first scientific mission with Sentry, a newly developed robot capable of diving as deep as 5,000 meters (3.1 miles) into the ocean.
The vehicle surveyed and helped pinpoint several proposed deep-water sites for seafloor instruments that will be deployed in the National Science Foundation’s (NSF) Ocean Observatories Initiative (OOI).
Sentry is a state-of-the-art, free-swimming underwater robot that can operate independently, without tethers or other connections to a research ship. The autonomous underwater vehicle, or AUV, is pre-programmed with guidance for deep-water surveying, but it can also make its own decisions about navigation on the mountainous volcanic terrain of the seafloor.
Working in tandem with sonar instruments on the UW-operated research vessel Thomas G. Thompson and with photo-mapping by WHOI’s TowCam seafloor imaging system, Sentry gathered the most precise maps to date of seafloor features known as Hydrate Ridge and Axial Volcano, around the edges of the Juan de Fuca tectonic plate off the coast of Oregon and Washington. Two nodes of a pioneering deep-ocean observatory are being planned for those locations.
“We are changing the way ocean science is done, launching a new era in which an ensemble of technologies will provide us with an increasing capacity for exploring and interacting with the global oceans,” said John Delaney, chief scientist of the expedition and principal investigator for the UW-led regional observatory in the OOI. “Robot mappers are helping design the new and transformational infrastructure to accomplish that change. That new infrastructure will empower the next generation of robots to go far beyond the current autonomous mappers.”
“This investment into emerging technologies is paying off in delivering state-of-the-art science support,” said Julie Morris, Director of NSF’s Division of Ocean Sciences. “In the near future, Sentry will conduct high-resolution oceanographic surveys that would be otherwise impossible.”
The one-of-a-kind, WHOI-built AUV—which was largely funded by NSF–made six dives during the July 22 to August 5 expedition. Sentry surveyed 212 linear kilometers of seafloor, or about 53 square kilometers, as it traced parallel lines like a lawn-mower making a pattern across a yard.”
“We have been very pleased with Sentry’s performance,” said Dana Yoerger, the lead WHOI engineer for Sentry. “We had tested the AUV as best we could before we got out here, but the steep terrain of the deep sea is quite a different matter. Our engineering team and our vehicle both performed very well under the stresses of putting a complex system into the ocean for the first time.”
The AUV can collect the data needed to make seafloor maps at a resolution of less than one meter. On this first cruise, Sentry collected as many as 60 million individual soundings of seafloor depth in a single dive.
“Sentry has given us a survey with great precision and resolution,” said Delaney. “These maps will help with the installation of the primary nodes of the networked observatory on the Juan de Fuca tectonic plate.”
Powered by more than 1,000 lithium-ion batteries—similar to those used in laptop computers, though adapted for extreme pressures Sentry dove for as long as 18 hours and 58 kilometers, with the potential for longer trips in the future.
Sentry is designed to swim like a fish or fly like a helicopter through the water. The sleek hydrodynamic design allows the vehicle to descend quickly from the sea surface to the depths (about 3,500 meters per hour). The novel shape also gives the vehicle tremendous stability and balance while cruising through bottom currents.
The vehicle has thrusters built into its foils, or wings. Like an airplane, the foils allow the vehicle to gain lift or drag or directional momentum, as needed. When necessary, the AUV also can hover over the bottom for close-up inspections, navigational decision-making, and for rising up and down over rugged seafloor terrain. The design allows the vehicle to start, stop, and change directions, whereas many AUVs tend to travel in one direction.
“We chose the body shape, the tilting foils, and the location of the thrusters to give Sentry a favorable combination of maneuverability over a wide range of speed, as well as hydrodynamic efficiency,” said Yoerger.
The AUV tracks its motion over the seafloor using a sophisticated inertial navigation system (INS), long-baseline (LBL) navigation triangulated from underwater beacons and, when within 200 meters of the bottom, an acoustic sensor can track the vehicles’ direction and speed with great precision.
“Sentry is a true robot, functioning on its own in the deep water,” said Rod Catanach, a WHOI engineer who works with Sentry. “The vehicle is completely on its own from the time it is unplugged on the deck and cut loose in the water. We can send a few simple commands, but there is no room to micromanage.”
With this mission successfully completed, Sentry is now ready to join the National Deep Submergence Facility (NDSF), a federally funded center based at WHOI that operates, maintains, and coordinates the use of vital deep ocean vehicles for the U.S. oceanographic community. Sentry will replace the Autonomous Benthic Explorer (ABE), Sentry’s predecessor in the NDSF and a pioneer in deep-diving vehicle operations since 1996.
“We’re grateful to the scientists of the University of Washington for believing in Sentry enough to schedule it for this early mapping phase of their project,” said Yoerger. “Technological progress relies on scientific users willing to accept some risk in return for the benefits of our new systems. Our colleagues at UW played this role in the past with our first Jason remotely operated vehicle and with ABE, so it was fitting that we made the first science cruise for Sentry with them.”
“Sentry’s niche will be the ability to run many types of dives, from long missions high in the water column to detect hydrothermal vent plumes to bathymetric mapping dives closer to the seafloor to close-up bottom photography in rugged terrain,” Yoerger added. “Sentry can be outfitted with a variety of instruments, and without those instruments being tightly integrated into the vehicle.”
Eventually, vehicles like Sentry and its successors will plug into and interact with the ocean observatory system, using the power charging systems and high speed communications delivered by the submarine networks.
On its first scientific mission this week, Sentry carried a multibeam mapping sonar, a water conductivity and temperature (CTD) probe, an optical backscatter sensor (to detect cloudy water), two magnetometers, and a sensor for detecting water chemistry related to hydrothermal vents, in collaboration with Ko-Ichi Nakamura of Japan’s National Institute of Advanced Industrial Science and Technology.
Funding for the development of Sentry was provided by the Ocean Sciences Division of the National Science Foundation (NSF), The Russell Family Foundation, WHOI’s Deep Ocean Exploration Institute, the Comer Science and Education Foundation, and WHOI’s Access to the Sea program. Funding for the OOI mapping cruise was provided by NSF through the Consortium for Ocean Leadership; by the Arizona State University; and by the UW School of Oceanography.
The Woods Hole Oceanographic Institution is a private, independent organization in Falmouth, Mass., dedicated to marine research, engineering, and higher education. Established in 1930 on a recommendation from the National Academy of Sciences, its primary mission is to understand the oceans and their interaction with the Earth as a whole, and to communicate a basic understanding of the oceans’ role in the changing global environment.

The autonomous underwater vehicle Sentry is lowered into the North Atlantic during deep-sea engineering trials in April 2008 on the research vessel Oceanus. (Photo by Chris German, Woods Hole Oceanographic Institution)

Scientists have finalized the locations of two observatory sites, or nodes, for the Regional Scale Nodes Project in the Ocean Observatories Initiative. The site at Hydrate Ridge gives them a chance to learn more about icy, energy-rich methane deposits and the life found there. On the other side of the Juan de Fuca Plate, a site was selected on Axial Volcano to study volcanism, hydrothermal venting, and other processes there. Both sites were surveyed in July by WHOI's Sentry autonomous underwater vehicle for the UW science team. (University of Washington)
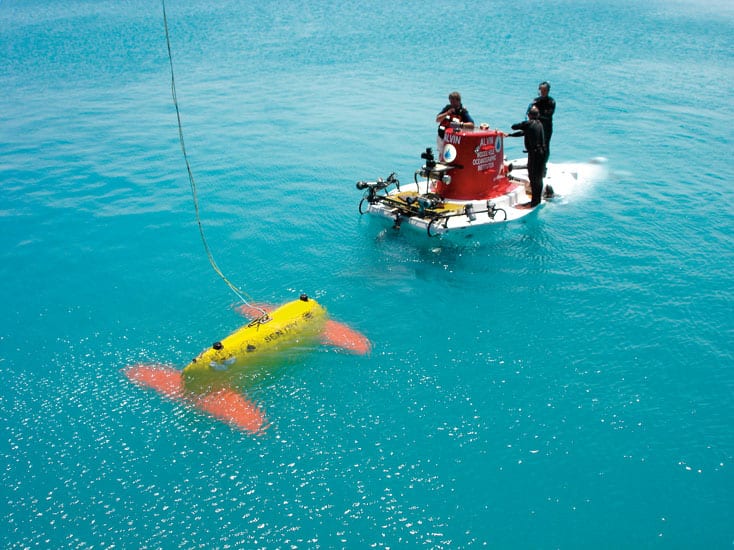
Sentry meets the submersible Alvin during a testing expedition off Bermuda in April 2006. Sentry is a robotic underwater vehicle used for exploring the deep ocean; it is likely to be used to complement Alvin and other ocean exploration vehicles by surveying large swaths of ocean floor to determine the best spots for close-up study. (Photo by Chris German, Woods Hole Oceanographic Institution)