
SOI Collaborating with WHOI on World’s Most Advanced Deep-diving Robotic Vehicle
December 5, 2013
Schmidt Ocean Institute (SOI) has begun working with the Deep Submergence Laboratory at the Woods Hole Oceanographic Institution (WHOI) to design and build the world’s most advanced robotic undersea research vehicle for use on SOI’s ship Falkor. The new vehicle will be capable of operating in the deepest known trenches on the planet, including the nearly 11,000-meter-deep Challenger Deep in the Mariana Trench. The design will capitalize on lessons learned from past WHOI vehicle designs, as well as advanced technologies developed for DEEPSEA CHALLENGER, the submersible and science platform that explorer and director James Cameron piloted to Challenger Deep in 2012 and donated to WHOI in 2013.
On Sunday, December 8th, Victor Zykov, SOI’s director of research, will publicly discuss the project for the first time at a University-National Oceanographic Laboratory System’s (UNOLS) Deep Submergence Science Committee meeting in San Francisco.
“We are excited to provide our collaborating scientists with a unique capability to conduct interactive scientific research and experimentation at the deepest places in the world’s ocean starting in 2015,” says Zykov.
Upon completion, the new vehicle will be one of only two robotic vehicles in the world capable of operating throughout the world’s hadal depths—from 6,000 to 11,000 meters. The other is WHOI’s Nereus hybrid remotely operated vehicle (HROV), which dove to the Challenger Deep in 2009.
“It’s great that Eric Schmidt and the institute have decided that hadal depths are worth exploring,” says director and explorer James Cameron. “It excites the imagination that there are still places on Earth that aren’t explored.”
Going Deep
Lack of access has left most of the planet’s deepest ocean areas virtually unexplored. WHOI’s Nereus, a proof of concept vehicle now being used on Falkor and other research vessels, offers unprecedented access to the deepest regions for scientists, enabling them to begin the first systematic exploration and studies of deep trenches. However, the globe is a large area to cover with a single vehicle, and engineers and scientists are eager to apply the latest technologies to a new vehicle.
“The vehicle being built for Falkor is a next-generation system that’s going to have expanded capabilities,” says Andy Bowen, the WHOI principal engineer behind the Nereus vehicle and leader of the SOI vehicle project at WHOI’s Deep Submergence Laboratory.
The new Schmidt Ocean Institute vehicle will double deepest robotic ocean access for scientists, and will offer specific strengths. The SOI vehicle will be, like Nereus, a hybrid remotely operated vehicle (HROV), meaning it can be configured to operate in a remotely controlled, tethered mode, or a free-swimming autonomous mode. In the remote configuration, the vehicle will connect to Falkor via a hair-thin fiber optic cable. This allows the vehicle to send high-resolution video up to the ship, and for pilots on the ship to control the vehicle. The thin tether weighs much less than a conventional ROV cable, vastly simplifying operation at great depths.
In the autonomous mode, the HROV will operate without the optical tether and instead follow pre-programmed exploration and data gathering plans. In this mode the HROV can cover up to 20 kilometers of territory, which is appropriate for high-resolution seafloor mapping, for instance, or collecting chemical data across a large area. If the thin tether breaks while in remotely controlled mode, the vehicle automatically returns to the surface in the autonomous mode.
SOI’s HROV will also be designed to operate in a new wireless remotely controlled mode via optical signals between the vehicle and what amounts to an underwater hotspot lowered from Falkor for operation down to 6,000 meters. Down to that same depth, SOI’s vehicle can also operate with a more traditional ROV tether that provides additional power and other capabilities.
Advances and Improvements
In contrast to Nereus, designers are optimizing the new vehicle for the remotely operated configurations. Among other goals, this will include more workspace to expand options for sample collection and the deployment and recovery of instrumentation. The SOI HROV will also be equipped with two manipulator arms that will allow an operator to hold a position with one arm by grabbing a fixed object such as a rock while using the other arm to collect a sample. The vehicle will be designed so that it can be outfitted with a variety of data and sample collection devices to accomplish a wide range of research goals.
As designers optimize the new vehicle plan, they’ll be drawing from lessons learned from both Nereus and Cameron’s DEEPSEA CHALLENGER. They are also exploring potential application of specific technologies developed for Cameron’s sub. These include advanced lighting and high-definition camera systems, as well as a patent-pending foam that can maintain buoyancy while also functioning as a structural element, eliminating the need for heavier components.
“It’s exciting to have made a legitimate contribution to deep-sea technology,” says Cameron, who serves on the advisory board of a new Center for Marine Robotics at WHOI, “I think for me that’s as much a fulfillment of a dream as actually having made the dive.”
Schmidt Ocean Institute and WHOI are finalizing design plans, with vehicle construction scheduled to begin next summer and completed by early 2015. After testing, the vehicle will be integrated into SOI’s 272-foot research vessel Falkor. The ship is dedicated to accomplishing SOI’s mission to enable research that expands understanding of the world’s ocean using advanced technology, intelligent observation, and open sharing of information. “Once this vehicle is integrated onto Falkor it will greatly expand our ability to accomplish our mission and provide scientists with unprecedented access to sectors of the ocean previously only imagined,” says Eric King, SOI’s director of marine operations.
Schmidt Ocean Institute was created by Eric and Wendy Schmidt in 2009 to enable research that expands understanding of the world’s ocean using advanced technology, intelligent observation, and the open sharing of information. The organization invites select scientific teams from around the world to conduct collaborative research at no cost aboard its 272-foot research vessel, Falkor, launched in 2012. Groups that would like to work aboard Falkor submit proposals peer reviewed by scientists from relevant fields. From proposals that receive high ranks for scientific value, the institute chooses those projects that best align with its mission and that require work in geographical areas Falkor can reach in a given year. For more information please visit www.schmidtocean.org.
The Woods Hole Oceanographic Institution is a private, non-profit organization on Cape Cod, Mass., dedicated to marine research, engineering, and higher education. Established in 1930 on a recommendation from the National Academy of Sciences, its primary mission is to understand the ocean and its interaction with the Earth as a whole, and to communicate a basic understanding of the ocean’s role in the changing global environment. For more information, please visit www.whoi.edu.
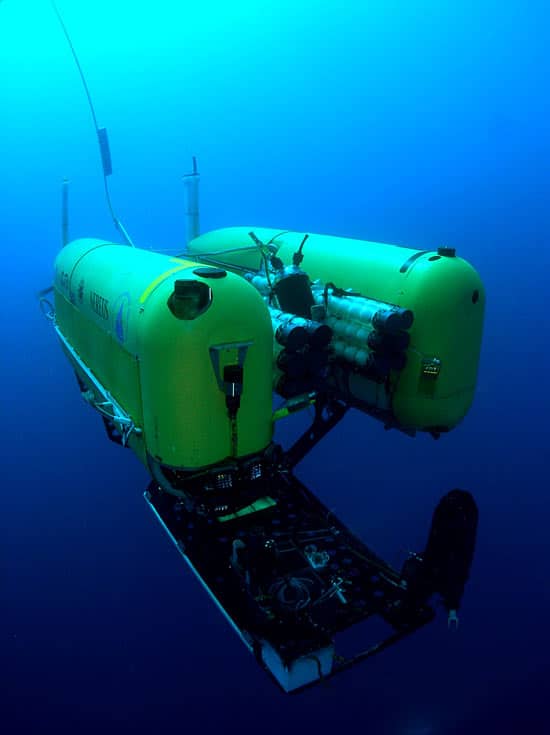
HROV Nereus from the water during its second expedition in 2009 to investigate hydrothermal vents along Earth’s deepest mid-ocean ridge in the Cayman Trough. On May 31, 2009, the robotic vehicle successfully reached the deepest part of the world’s ocean—the Challenger Deep in the Mariana Trench in the western Pacific Ocean. The one-of-a-kind vehicle can operate either as an autonomous, free-swimming robot for wide-area surveys, or as a tethered vehicle for close-up investigation and sampling of seafloor rocks and organisms. Take an Interactive Tour of Nereus to learn more. (Photo courtesy Advanced Imaging and Visualization Laboratory, Woods Hole Oceanographic Institution)

Recovering Nereus after work on Falkor at the Cayman Trough.
(Leighton Rolley)