
The hive mind behind a swarm of submersibles
Published: October 16, 2019
Erin Fischell explains her new vision for underwater science
October 16, 2019

The vastness of our oceans demands extensive study methods. Erin Fischell, an assistant scientist in the Department of Applied Ocean Physics and Engineering, has been experimenting with a swarm of autonomous underwater vehicles that aim to both minimize cost and maximize the scope of scientific assessment at sea.
Beginning as a graduate student in the MIT-WHOI Joint Program, Fischell has dedicated years of research to the refinement of this technology, including her clever integration of sound sensitivity into each vehicle's navigation system. Her work has helped her achieve the Moore Inventor Fellowship from the Gordon and Betty Moore Foundation for innovation in the field of robotics.
Today she sits down to reflect on her process.
What is your invention?
My invention is a way to command and control large numbers of autonomous underwater vehicles (AUVs) in swarms using a low-cost relative navigation technique based on the Doppler effect. Doppler shift is the frequency change that occurs when a sound-producing body is moving towards or away from the listener- the sound is higher-pitched when the sound source is approaching, lower-pitched when the sound source is moving away. By exploiting this effect, an AUV can use the observed tone of a beacon to control position relative to a beacon located on surface ship, fixed mooring, AUV, or other platform. Using this method, low-cost AUVs equipped with a single hydrophone (underwater microphone) and mission-dependent science payload can be commanded, remain together in a swarm or formation, and collect synchronous, volumetric sensor data in the ocean.

Fischell sits with Sandshark AUVs before a deployment at Ashumet Pond. Photo by Thomas N. Kleindinst, Woods Hole Oceanographic Institution
Why does the outcome matter?
The ocean covers 70 percent of the earth’s surface, and is critical to all life on earth: it is home to diverse marine ecologies, and has significant impact on land-based ecosystems through weather and climate. In addition, the ocean has a profound impact on our changing climate, acting as an absorber of carbon dioxide and heat, actually slowing the warming of the atmosphere. This absorption of heat and carbon dioxide impacts the ocean, with the most delicate of ecologies such as coral reefs already experiencing the effects of ocean acidification and increased temperature in bleaching events and die-offs. To really understand the complex interplay of physical, chemical and biological processes in the changing ocean, we have to measure water properties and biological content across the volume of the ocean. With swarms of AUVs, it will finally possible to measure temporal-spatial changes in the ocean at the scale that impacts biology and energy transfer, linking together the small and large scales and providing data with synchronized density that is unattainable using conventional methods.
What (or who) inspired you to focus on this problem/invention and why?
In 2015, while I was a postdoctoral researcher MIT, I worked with one of the first prototype low-cost AUVs as a part of a DARPA (Defense Advanced Research Projects Agency) project. I was excited, thinking that the technology would make it possible to run many vehicles at once to provide synchronous science data for understanding complex oceanographic features. Unfortunately, it was immediately apparent that the navigation system was not up to the task: With a navigation drift of more than 100 meters per 10 minutes submerged, visions of running swarms of AUVs came crashing down. Since then, I have worked on the problem of how to make that vision of sensing the ocean volume using low-cost vehicles a reality, first with a technique that required a high-precision clock, and now with this invention which does away with the clock for a true low-cost, scalable method.
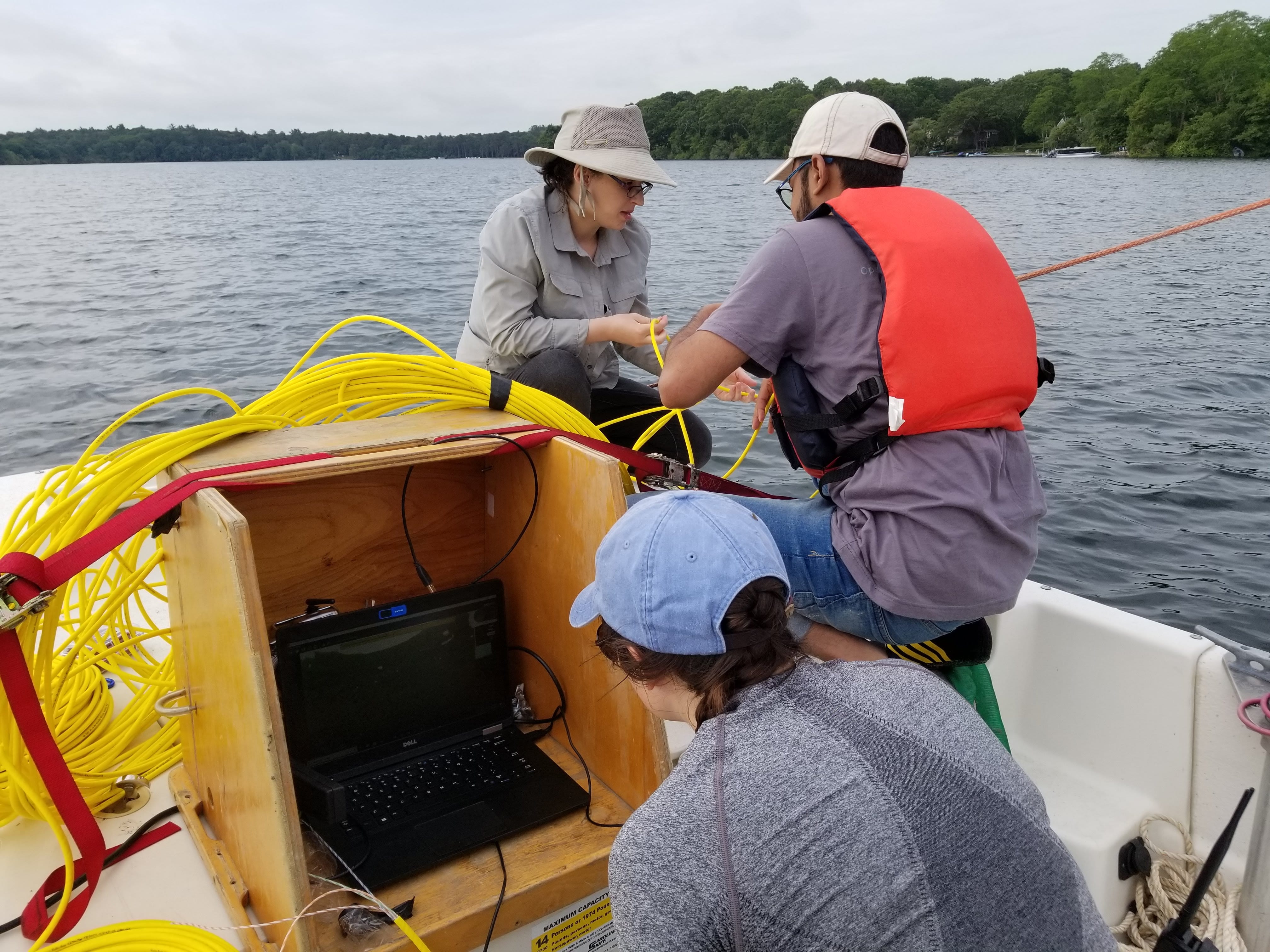
Fischell with student Mursaline, deploying an ROV this past summer.