
Spray Glider

Operation
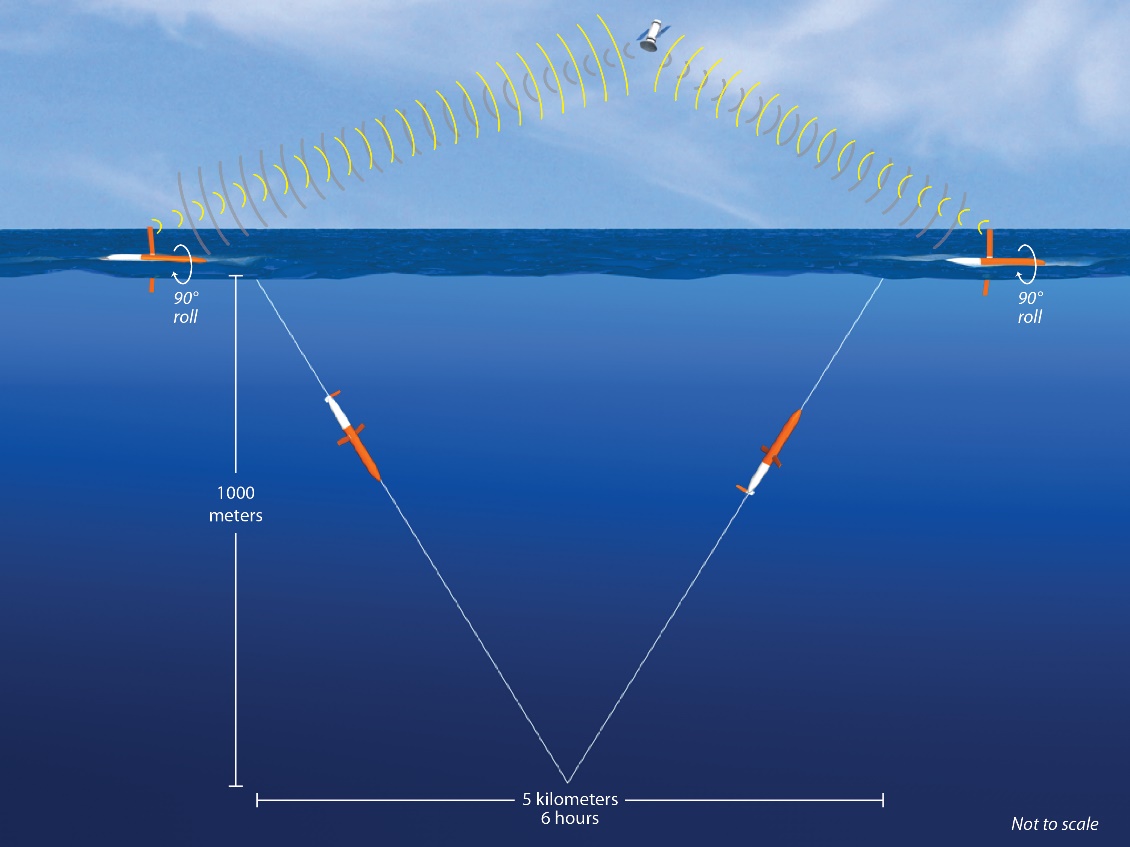
Spray Gliders roam the ocean independently, running pre-programmed routes and surfacing occasionally to transmit collected data and accept new commands. As they cruise horizontally through the ocean, internal bladders control their buoyancy, enabling them to navigate up and down through the water column like whales and other marine animals.
Unlike faster-moving AUVs designed for high-speed sampling, gliders are best suited for studies where high-resolution observations of weekly or monthly changes in the ocean are required.
A Spray Glider is deployed off the coast of Miami to monitor the Gulf Stream at different depths up through New England.
Measurements
The instruments navigate via GPS, and are equipped with a suite of sensors for sampling water quality parameters including temperature, salinity/conductivity, pressure, chlorophyll fluorescence, current velocity, and dissolved oxygen. When gliders surface, their recorded measurements are transmitted to shore via satellite communications, providing scientists with real-time remote access to the data.
Spray Gliders carry a variety of sensors to measure ocean properties including temperature, salinity, and pressure. They can also be equipped chlorophyll fluorometers, oxygen sensors, and acoustic Doppler current profilers.
Recent Applications
State-of-the-art spray gliders are currently monitoring the Gulf Stream along the east coast of the United States to better understand the stability of its currents, and how factors like hurricanes and geologic features along the ocean floor affect its strength. Gliders are being used off Cape Hatteras, North Carolina to help scientists understand how the cool currents along the continental shelf interact with the warm waters of the Gulf Stream. The physics controlling this exchange of water may have implications on fishing and ocean-related activities along the U.S. eastern seaboard.