R.I.P. A.B.E
The pioneering Autonomous Benthic Explorer is lost at sea
A pioneering deep-sea exploration robot—one of the first successful submersible vehicles that was both unmanned and untethered to surface ships—was lost at sea March 5, 2010, on a research expedition off the coast of Chile. The Autonomous Benthic Explorer, affectionately nicknamed ABE, had reached the seafloor during its 222nd research dive when all contact with research vessel Melville abruptly ceased.
Researchers believe the vehicle may have suffered a catastrophic implosion of a glass sphere used to keep ABE buoyant. An implosion, under pressure equivalent to more than two tons per square inch at depths of 3,000 meters (1.86 miles), would have instantly destroyed independent on-board systems to maintain communication and to bring ABE back to the surface in the event of failures. The loss had nothing to do with earthquake activity off Chile, the scientists said.
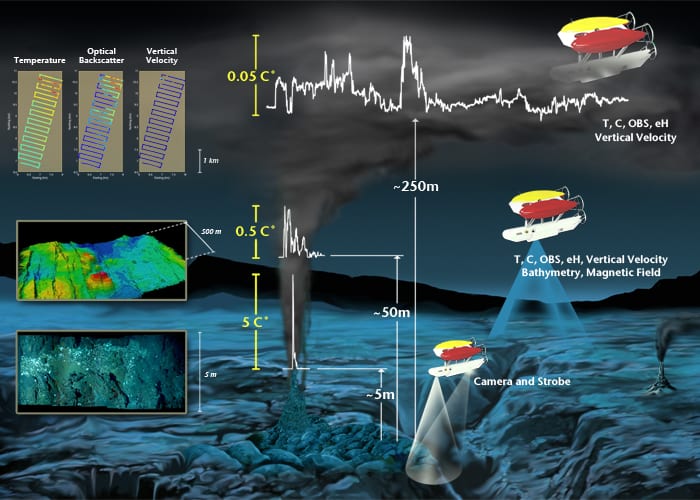
Using funds from the National Science Foundation, ABE was designed and built in the early 1990s by scientists and engineers at the Woods Hole Oceanographic Institution (WHOI). It helped to herald a new kind of deep-submergence vehicle—the autonomous underwater vehicle, or AUV. Unlike human-occupied submersibles or vehicles connected by cables to surface ships, the free-swimming ABE could survey wide swaths of undersea territory on dives lasting up to a day. ABE was programmed to maintain a designated course but had enough decision-making capacity to avoid collisions with seafloor terrain, to make high-resolution maps, “sniff out” unusual chemicals emerging from the seafloor, and photograph biological communities and complex geological features. (See multimedia on right.)
“It revolutionized deep-sea exploration by expanding scientists’ abilities to reach into the deep,” said Chris German, National Deep-Submergence Facility chief scientist at WHOI and a co-chief scientist of the expedition off Chile.
From skepticism to optimism
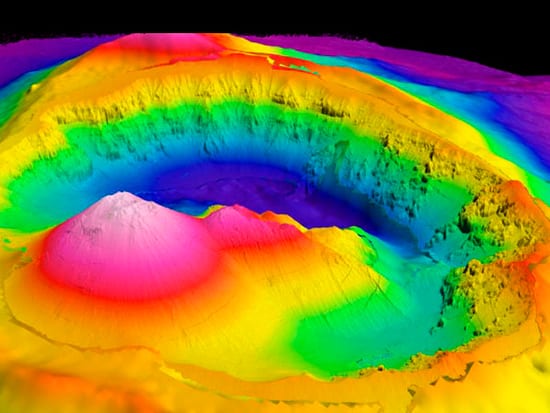
Built as a prototype, ABE became a workhorse. It was the first autonomous robot to make detailed maps of mid-ocean ridges, the 40,000-mile undersea volcanic mountain chain at the boundaries of Earth’s tectonic plates where new seafloor crust is created. It was also the first AUV to locate hydrothermal vents, where hot, chemical-rich fluids spew from the seafloor and sustain lush communities of deep-sea life. ABE explored seamounts, undersea volcanoes, and other areas with harsh, rugged terrain in oceans throughout the world and with scientists from around the world.
“Mars may belong to the rovers, but the oceans belong to the Autonomous Benthic Explorer,” wrote the editors of Wired magazine in 2006 when it enshrined ABE among its “50 Best Robots Ever,” a compilation of real and fictional robots. The list contained cinematic robotic stars such as HAL 9000 (the calmly murderous computer in 2001: A Space Odyssey), R2-D2 of Star Wars fame, and the Terminator. But it also included the Mars rovers, life-saving medical devices, and military equipment such as Predator unmanned aerial vehicles and tank-treaded Packbot reconnaissance droids.
The designation tickled Al Bradley, Dana Yoerger, and Barrie Walden, who designed and built ABE with fellow WHOI engineers Rod Catanach, Al Duester, and Steve Liberatore. Recognizing ABE’s coincidental resemblance to the Starship Enterprise, they playfully stenciled “NCC-1701” on ABE’s flanks—the same numbers that adorned the fictional Star Trek spaceship.
“When we first started working on ABE, very few scientists thought AUVs would be useful for science,” Yoerger said. “After we built the vehicle, we struggled for an opportunity to test ABE at sea and were denied funding several times. In the mid-90s, we managed to get ‘space available’ on cruises, and ABE started working. Its first dive in 1994 in the deep ocean was a near disaster. ABE went straight to the bottom at 4,100 meters and could not release its descent weights. Alvin [WHOI’s human-occupied submersible] had to rescue it. Fortunately, we learned from our mistakes and made substantial progress after that.”
ABE’s early break
In 1995, WHOI geophysicist Maurice Tivey offered to bring ABE along on a voyage that he and University of Washington scientist Paul Johnson were leading to the Juan de Fuca Ridge off the U.S. Pacific Northwest. Carrying a magnetometer, ABE’s steady, low-flying ride and precise navigation allowed it to collect impressive measurements of magnetic properties of newly erupted lava on the seafloor, demonstrating its abilities as a deep-submergence surveying tool.
Nevertheless, the ABE team could not get funding to use ABE again until 1999, for a voyage to the East Pacific Rise mid-ocean ridge led by Marie-Helene Cormier and Bill Ryan of Lamont-Doherty Earth Observatory.
“If we failed, it probably would have been our last chance,” Yoerger said. The team added a scanning sonar that could make seafloor maps that displayed fine details of volcanic and geological features.
“We see things that we have never been able to visualize before,” Ryan reported as the cruise ended. “Your Deep-Submergence Laboratory and ABE group have created and now test-proven an extraordinary new tool.”
A robot makes a name for itself
The cruise launched ABE’s early career as scout and cartographer, working in tandem with other vehicles. ABE would dive at night and resurface in pre-dawn light. Researchers would download ABE’s data, create fresh seafloor maps of the area, and hand them to Alvin pilots and scientists about to descend to the seafloor.
Over the next few years, with funding from the National Oceanic and Atmospheric Administration, the ABE team improved the AUV’s capabilities, adding more advanced sonar, navigation, battery systems, and sensors to measure temperature, turbidity, and chemicals in the water. With those sensors, ABE launched a new career as a “bloodhound” sniffing out and homing in on seafloor hydrothermal vents and the communities of deep-sea life surrounding them.
“In the early days, ABE was considered a secondary survey system,” Yoerger said. “Alvin or a [tethered] remotely operated vehicle like Jason would get funded to do work, and we would find extra money to bring ABE along. But as our confidence in ABE grew and demand for its services increased, ABE was funded to go on expeditions where it was the primary tool.”
“The development team at WHOI should be proud of ABE‘s accomplishments,” said Julie Morris, director of the NSF Division of Ocean Sciences. “Current and future AUVs owe their success and popularity to the pioneering work of these engineers and scientists.”
Son of ABE
The same ABE team went on to build a direct descendant, a new AUV called Sentry, which was launched on its first scientific mission in 2008. With Sentry online, ABE was being transitioned into a new role as an engineering development platform to test new concepts—“put out to stud,” Yoerger joked. But Sentry had already been committed to another research expedition this March, so ABE was brought back into service for a mission to explore the Chile Triple Junction, the only place on Earth where a mid-ocean ridge is being subducted (or pushed beneath) a continent (South America) in a deep ocean trench.
Once again Yoerger joked, “Like the rest of us, ABE tried to retire, but we wouldn’t let it.”
A few days after ABE disappeared, he wrote, “We’ve shed our tears for our robotic friend, we’re ready to move on. My e-mail inbox has been full with messages from friends and colleagues all over the world, expressing their regrets, boosting our spirits, and assuring us that ABE‘s legacy as a pioneering explorer of the deep sea will endure.
“We have always accepted risk in how we operated ABE. We made many expeditions to remote places (like this one) with no possibility of rescue if something went wrong. This enabled us to pull off expeditions that would have been too expensive if we had insisted on a backup from another remotely operated or human-occupied vehicle. We decided to accept that risk, and it paid off with many scientific discoveries. Early last Saturday morning at 3000 meters at the Chile Triple Junction, that string ran out.”
“That is very sad news,” wrote Colin Devey, professor at the Leibniz Institute of Marine Sciences at the University of Kiel. “Even if it is ‘only’ a machine, I know it will feel like losing a friend. Personally, ABE was the vehicle which inspired me to try and bring deep AUV technology to Germany. It was a true trailblazer, which proved time and again how little we know about the deep sea. But if it had to go, I guess the deep sea was the best place for it to happen—a fitting grave for a pioneer of deep-water science.”
Yoerger said the now-former ABE team “won’t have time to mope.” The researchers got off Melville on March 12 and flew to the Galápagos Islands to meet the research vessel Atlantis. “The chief scientist has planned 27 Sentry dives for a 29-day cruise,” he said. “We’ll be back on the horse right away. I’m grateful for that.”
Share or read stories about about on Woods Hole Oceanographic Institution’s Facebook page.
–>
Slideshow