WHOI and Access to the Sea
In the mid-term future, two WHOI ships (Knorr in about 2006 and Oceanus in about 2009) will reach the end of their planned service lives. There is general agreement that WHOI should work to replace them with two vessels.
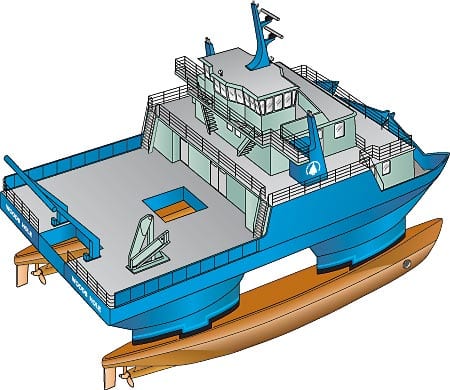
In the mid-term future, two WHOI ships (Knorr in about 2006 and Oceanus in about 2009) will reach the end of their planned service lives. There is general agreement that WHOI should work to replace them with two vessels. One ship would likely fall between their two sizes at about 200 feet, as the existing large UNOLS ship fleet appears to be adequate. This vessel should have on the order of 25 scientific berths and offer plenty of deck space for vans and such operations as component-intensive moorings. It should cruise at about 12 knots, be able to stay at sea for 30 days, and have a small crew to reduce the daily rate. There is less consensus on a second, small vessel that is likely to be used cooperatively by several organizations (see preceding article). It should probably be 65 to 100 feet long, possibly of SWATH design, if that design proves appropriate for oceanographic research in the northwest North Atlantic. It should offer 10 to 12 science berths, a small crew (1 to 2 in port, 3 to 6 underway), seakeeping for safe year-round operations in the Northeast, and a dynamic positioning system.
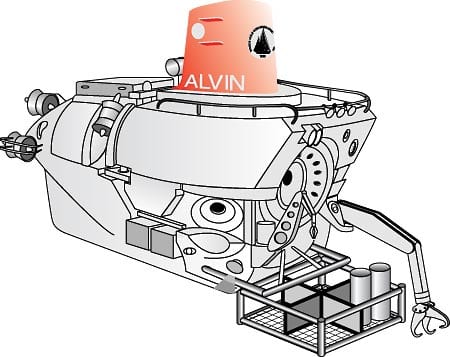
The National Deep Submergence Facility operated by WHOI has consistently provided US and international scientists with the ability to reach and study the abyss for some three decades. Alvin, the first vehicle in the facility, is ageless, having been continuously modernized over its life span. It is currently rated to dive to 14,764 feet carrying two observers and one pilot. The submersible is overhauled completely every three years, resulting in a vehicle system that is the best in the world in terms of efficiency, ease of operation, reliability, safety, and cost effectiveness. One option for improving Alvin’s capabilities would be to merge Navy’s Sea Cliff with Alvin after Sea Cliff is taken out of service in 1998. Sea Cliff has a 6,100-meter sphere and considerable peripheral equipment that could upgrade Alvin. The Office of Naval Research and other federal agencies have indicated a desire to explore various options related to Sea Cliff.
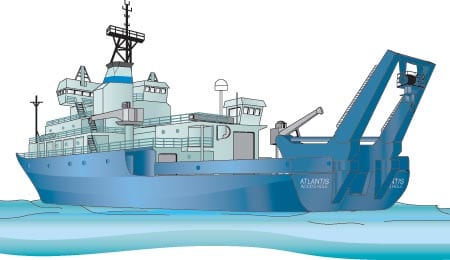
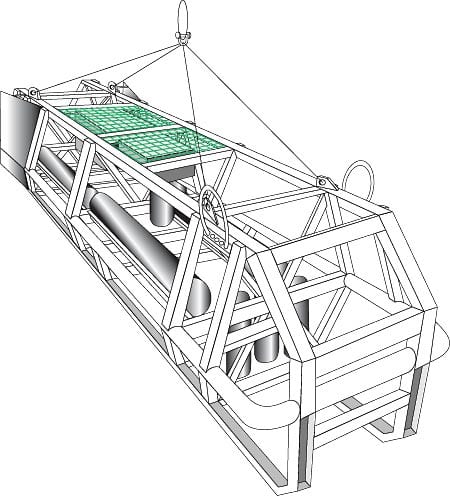
Since 1993, the facility has included the fiber-optic based, tethered, remotely operated vehicle team Medea/Jason and the towed Argo-II and DSL-120 Sonar mapping system. These vehicles (developed with Navy and Institution funds) are now routinely requested by scientists, and supported by the funding agencies, to carry out multi-diciplinary research in the oceans down to 6,000 meters. This suite of tethered and submersible vehicles is unique in the world, and offers US scientists investigative synergy that provides unprecedented access to the deep ocean to carry out a spectrum of biological, geological, physical, chemical, and technology related experiments. R/V Atlantis is uniquely outfitted to operate these vehicles as a suite of oceanographic tools.
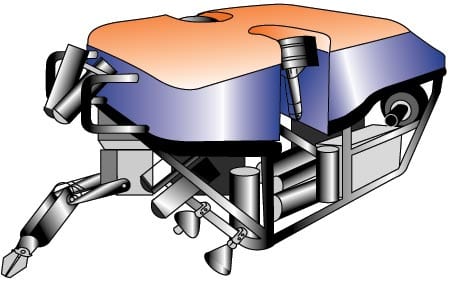
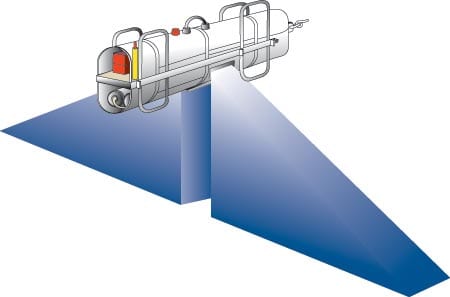
We believe that there will continue to be an important niche for Alvin and the ROV and tethered systems in the coming 10 to 20 years. Each vehicle provides a unique capability for carrying out different types and scales of oceanographic studies. These range from high-resolution seafloor mapping in all tectonic locales to site-specific mapping, sampling, and seafloor observatory installation and monitoring to provide key temporal components of oceanographic and magmatic processes at the seafloor and in the deep ocean. The areas of deep submergence facilities that will require focused attention in order to sustain a robust deep submergence program include Alvin upgrades and improvement of the sub’s operational systems, ROV and tethered vehicle improvements, and integration of Autonomous Underwater Vehicle (AUV) systems such as ABE, the Autonomous Benthic Explorer. ABE proved its mettle in recent magnetic surveys on the Mid-Atlantic Ridge, while a prototype of the shallow-water REMUS (REMote environmental sensing UnitS) developed by the WHOI Ocean Systems Laboratory has been successfully tested in local waters as a tool for coastal seafloor mapping. It is important that we build on these successes in this rapidly moving and highly competitive technology. It is, in fact, appropriate to begin now to develop the next generation of remotely operated and autonomous vehicles.
WHOI is uniquely positioned, with strong engineering capabilities, to be a major player in ocean observatory programs. We see these unmanned observatories as a very important element of future oceanography. They require some shifts from oceanography-as-usual, since their success depends on close cooperation and coordination between scientists and engineers, better than usual management skills from project leaders, and longer than usual planning cycles.
WHOI has played a major role in the evolution of drifting sensors from Swallow floats through SOFAR and RAFOS drifters to today’s rapidly improving family of profilers (ALACE, PALACE, SLOCUM). Floats and drifters will be heavily used in future ocean sensing, and our involvement should continue.
Slideshow