Flying Blind in the Ice Factory
Scientists test innovative technology to navigate vehicles under Arctic ice
Al Plueddemann wants to push the envelope and fly a robotic vehicle into the wild blue under the polar ice cap.
North of Alaska lies a key region for understanding Earth’s climate. In this place, huge volumes of sea ice are formed and, in the process, ocean water is transformed in ways that prevent the sea ice from melting.
“The problem is that these important transformations occur in water beneath the sea ice, so they are difficult to observe,” said Plueddemann, a scientist at Woods Hole Oceanographic Institution (WHOI). He wants to use autonomous underwater vehicles (AUVs) to go into these inaccessible areas of the ocean and observe the processes going on there. But that leads to another challenge.
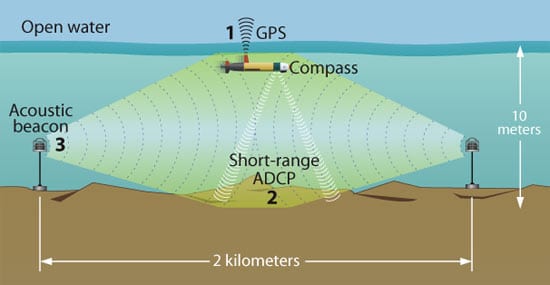
AUVs navigate by sound. In the vast, dark, three-dimensional space of the ocean, AUVs maintain fixes on their position in three ways. Like people feeling their way through a dark room by touching a wall, AUVs keep in contact with the seafloor by “touching” it with sound waves, using an acoustic Doppler current profiler (ADCP). They also keep within listening range of acoustic beacons placed on the seafloor, which emit sound signals that can be heard 1 to 2 kilometers away. Finally, the AUVs can rise to the surface to get a Global Positioning Satellite (GPS) signal. With three methods of navigational reference (and a compass to keep it pointed in the right direction), AUVs usually don’t get lost.
When AUVs move into deeper water, however, their ADCP signals can’t reach the seafloor. And, under Arctic ice, it’s difficult and expensive to set seafloor acoustic beacons every 2 kilometers.
“We have to stretch the box in which the AUV can navigate—horizontally and vertically—all at once,” Plueddemann said. “And then we also have to deal with a lid on it—the sea ice—so we can’t use GPS.”
Creating the Arctic halocline
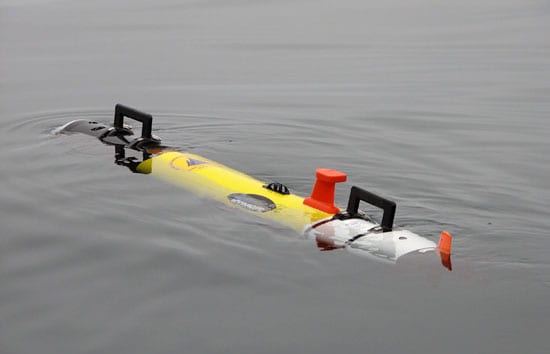
Plueddemann and colleagues in the WHOI Ocean Systems Laboratory installed an inertial navigation system (INS) into one of WHOI’s Remote Environmental Monitoring Units (REMUS)—a portable, 100-pound, 6-foot, battery-powered AUV. The navigation system uses the vehicle’s orientation, acceleration, and propeller turns to calculate an approximate position. In theory, an INS would allow AUVs to navigate via dead reckoning over longer distances between beacons. It’s a bit of a technological trapeze act with no acoustic safety net.
With a grant from the WHOI Ocean and Climate Change Institute (through a gift from the Comer Science and Education Foundation), Plueddemann chose to field-test the new INS-equipped REMUS in a scientifically strategic locale—off Barrow, Alaska. Here, a confluence of circumstances conspires to create sea ice and, more important, to “transform” water so that it shields and protects the polar ice cap. Cold, relatively fresh water from the Pacific Ocean enters through the Bering Strait, flows across the shallow Chukchi Sea, and surges along the coastline off Barrow. Frigid winter winds whip off the Alaskan landscape, cooling Chukchi Sea waters all the way down to its shallow bottom, making it easier to form sea ice. The winds then blow the newly formed ice away, leaving open patches of cold water to create more ice.
“Scientists call this place ‘the ice factory,’ ” Plueddemann said. “But it’s also a ‘Pacific water transformation factory.’ ”
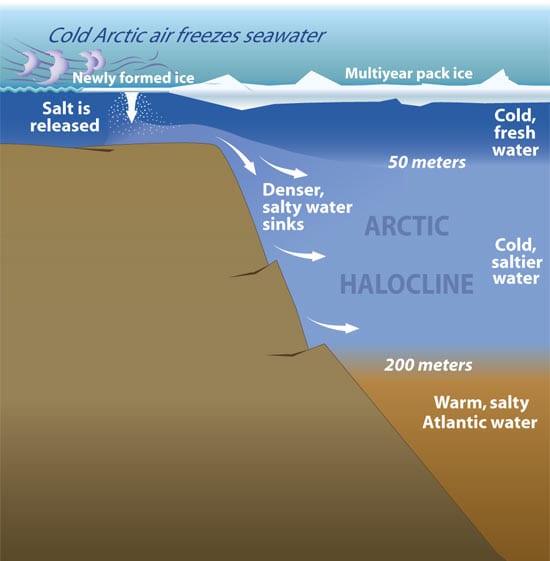
When seawater freezes to form sea ice, salt is released into surface waters, which become denser and sink. This creates a pool of cold, salty water that flows into the Arctic Ocean basin, It spreads to form a layer called a halocline, which lies above an even saltier, denser layer of water originating from the Atlantic Ocean (see illustration at left). The halocline shields sea ice from contact with the significantly warmer Atlantic layer, which could potentially melt the ice and cause momentous climate changes well beyond the Arctic.
Field tests above the Arctic Circle
Plueddemann—along with WHOI engineers Greg Packard and Jeff Lord and WHOI postdoctoral fellow Andrey Shcherbina—went to Barrow in the summer of 2005 to test the new INS-equipped REMUS initially in less risky ice-free summer waters.
Barrow is 340 miles north of the Arctic Circle. It has a population of about 4,500, mostly Inupiat, but no harbors or docks. So the team had to launch their chartered 30-foot aluminum boat from the beach. Temperatures in August were near freezing.
From the boat, they launched an INS-equipped REMUS with sensors that successfully collected the first detailed measurements of water temperature and salinity and currents off Barrow. But they were not surprised that the field tests revealed subtle, unanticipated glitches. For example, the INS’s noisy power supply was too close to the ADCP and interfered with its bottom-tracking acoustic signals.
At the same time, however, the experiment also “changed our view of how under-ice operations could be conducted,” Plueddemann said. The INS tracked well enough in shallow water to keep REMUS on its intended course. Assisted by just one navigational reference point—bottom-tracking—it appears feasible that REMUS could complete a 20- to 30-kilometer round trip between beacons. To allow AUVs to maintain contact with the bottom in deeper water, the team is integrating a new ADCP that uses lower-frequency sounds waves, which transmit over longer distances.
The next hurdle is to get AUVs to home into moving (rather than fixed) acoustic beacons. The researchers’ vision is a network of moorings—locked into sea ice and stretching across the ice cap—with beacons hanging down into the ocean and AUVs happily hopping among them.
Slideshow