Communicating Under Sea Ice
Engineers use ocean channel to efficiently relay sound
Banks Island is one of 36,563 ice-covered islands sprinkled in the Arctic Ocean north of Canada. It is home to the world’s largest population of muskoxen—about 68,000—one tiny village with a population of slightly more than 100 people, and an airport, which during the spring and summer of 2014 bustled with researchers poised to jump into the vast white Arctic.
Peter Koski and John Kemp, two engineers at Woods Hole Oceanographic Institution (WHOI), waited in the isolated village through days of high winds and frozen fog. Finally, on a Saturday in March, the weather cleared. A pilot gave the OK. Then pilot, co-pilot, mechanic, Koski, and Kemp took off and flew out over the frozen Beaufort Sea in a small red Twin Otter plane packed full of cables and buoys.
During two days of hectic, hopscotching flights, taking off and landing on patches of floating sea ice, they set up equipment at eight remote sites to carry out a long-awaited experiment. Their goal was to establish a long-distance communications system that would transmit and receive signals under water and under ice.
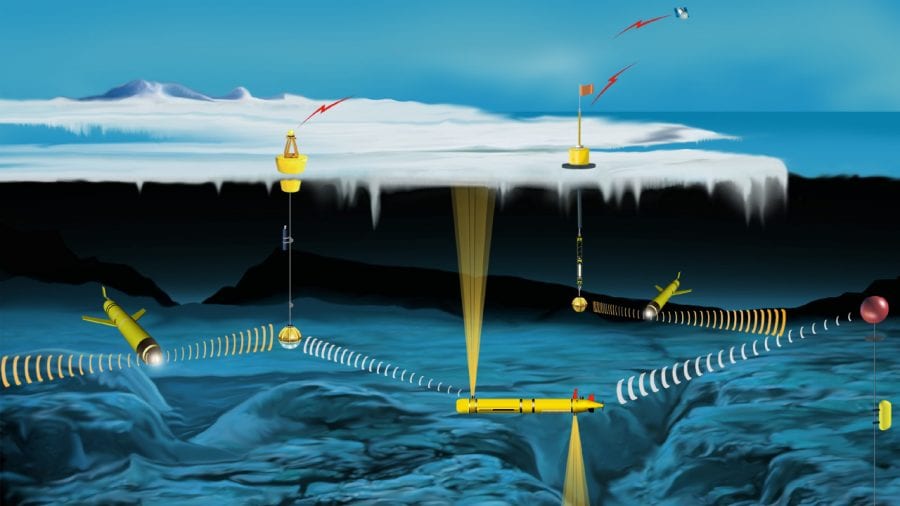
Like the telegraph in the Old West, such a system could open up this previously inaccessible ocean to exploration, allowing fleets of autonomous underwater vehicles to navigate and collect data in ice-covered areas where ships and people cannot easily go. Such data are essential for scientists and the Navy to gain better understanding of the Arctic, a critical region for both environmental and military reasons, that is rapidly changing.
The key to the experiment lay in taking advantage of a naturally occurring layer of water that forms in the Arctic and efficiently channels sound over long ranges—a sound duct within the ocean. Scientists and the Navy had exploited similar sound ducts in other oceans to measure the water temperatures and find distant submarines. Would it work in the Arctic Ocean, where the upper 3,280 feet (1,000 meters) of the ocean is completely different than anywhere else in the world?
Sound pipelines within the ocean
Many transmission options available on land, such as light and radio waves, don’t work under water. But as whales know well, sound travels far under water, especially low-frequency sound. Indeed, scientists with acoustic receivers can sometime hear the deep tones of whale songs or sound waves from earthquakes from thousands of miles away.
During World War II, two scientists, Maurice Ewing and J. Lamar Worzel, conducted basic research at WHOI on sound wave propagation in the ocean—seeking any advantages that would help the Navy detect enemy submarines or mines, or help American subs avoid detection. In a critical experiment, they detonated one pound of TNT under water near the Bahamas and detected the sound 2,000 miles away near West Africa.
The test confirmed Ewing’s theory that low-frequency sound waves were less easily scattered or absorbed by water and could travel very far. The scientists discovered a layer of water, between 2,000 and 4,000 feet deep in the ocean, that acted like a pipeline to channel low-frequency sound and transmit it over long distances: the SOFAR (Sound Fixing and Ranging) channel.
The explanation for the SOFAR channel is that the ocean settles into either denser or more buoyant layers of water based on their salinity and temperature. Sound energy travels in waves that speed up in waters near the surface, where temperatures are warmer, or near the bottom, where water pressure is higher. In between lies the SOFAR channel, which is bounded top and bottom by water layers where sound velocities are high and sound dissipates quickly. The boundaries act like a ceiling and floor. When sound energy enters the channel from below, it slows down. When it interacts with the ceiling, it is refracted back downward. Eventually it reaches the bottom boundary of the channel, the high-pressure water near the seafloor, and is refracted back upward again. In this way, sound is efficiently channeled horizontally with minimal loss of signal.
The Navy immediately saw the value of the SOFAR channel. It deployed a network of underwater microphones, called hydrophones, to optimally exploit the SOFAR channel to listen for submarines.
More than six decades later, WHOI researchers explored whether something similar might work in the Arctic. A WHOI engineering team led by Lee Freitag and including Keenan Ball, James Partan, Peter Koski, and Sandipa Singh developed a system to achieve long-distance sound communication under the ice, enabling the control of navigation of autonomous vehicles. Koski and Kemp brought it to Banks Island to put it to the ultimate test.
A multi-layered Arctic Ocean
The reasons to study the Arctic are compelling. It is the region of the globe that is warming fastest, causing rapid changes in air-ice-ocean dynamics that not only change the Arctic’s climate but also have cascading impacts on global climate. Arctic sea ice is diminishing in summer, opening navigation routes and changing the naval theater of operations.
Barriers to studying the Arctic are numerous: 24-hour darkness in winter, severe weather and safety concerns, high expense, and few ships capable of moving through ice. Autonomous underwater vehicles (AUVs) offer a way around these difficulties, since they could work under the ice without scientists or ships present.
The biggest obstacle has been communications and navigation. Even in summer, ice makes it impossible for an AUV to come to the surface, take a GPS reading, transmit its data and position, and receive commands.
“We wanted to learn whether we could use acoustic communication in the Arctic to support autonomous vehicles and sensors,” Freitag said. “We’re exploiting the propagation of sound in the ocean to build a navigation and communications system in the Arctic, so we can tell the vehicles where the ice boundary is, whether they should go north or south, east or west.”
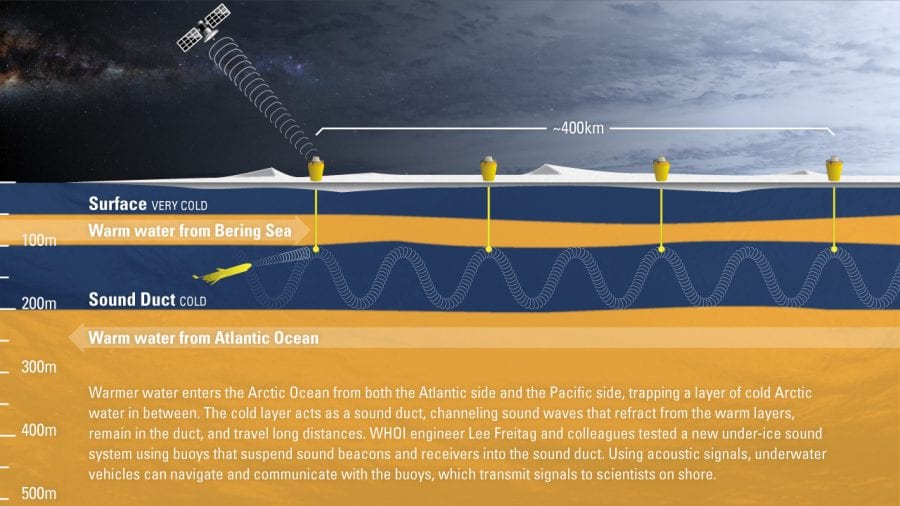
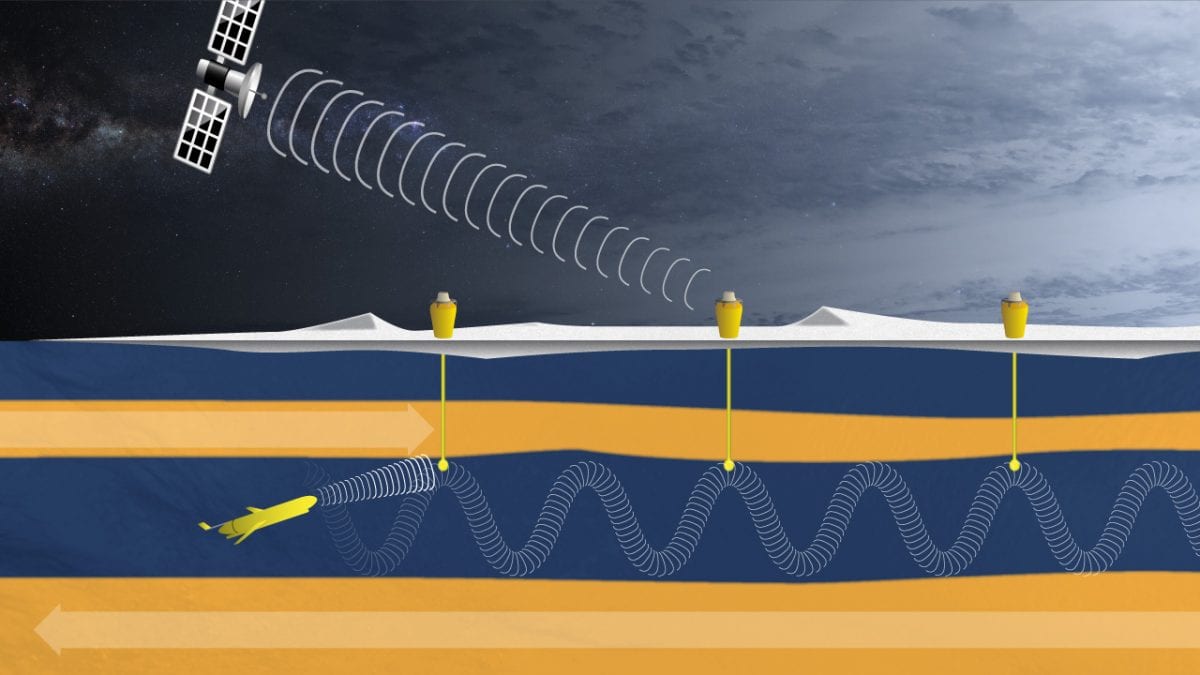
The system is designed to take advantage of a unique combination of conditions that creates a sound channel in the Arctic Ocean. At the top of the world, water enters the Arctic Ocean from both the Atlantic and Pacific. Both incoming water masses are warmer than the water residing in the central Arctic Ocean.
“A deeper layer of warm water comes in on the Atlantic side through the Fram Strait,” Freitag said, “and circulates around the Arctic Ocean at about three hundred meters depth. A different current of warm water comes in from the Pacific side, from the Bering Sea, in the summer, and it goes to about fifty to a hundred meters deep.”
These different incoming currents create a watery “layer cake” of different densities and temperatures in the Canada Basin, where Freitag’s team worked.
“You have very cold Arctic air above the surface, causing very cold water at the surface,” Freitag said. “Then a warmer layer originally from the Pacific at fifty to a hundred meters. Then a layer of colder central Arctic Ocean water below that, and finally at three hundred meters, there’s the layer of warmer Atlantic water.”
The two warm layers create top and bottom boundaries to a colder layer, which is the sound duct. While narrower in depth than the SOFAR channel of the temperate ocean, the sound channel in this area north of Alaska and Canada acts similarly.
“Sound stays in this duct, bounded by these two warm layers,” Freitag said. “Warmer water above and below results in a faster sound speed. Sound bends away from the faster water and the sound in the duct travels farther. Nothing magic, it’s just physics.”
Hopscotching on sea ice
Back on Banks Island, Koski and Kemp waited to test the new acoustic communications system as poor weather canceled takeoffs and research teams stacked up waiting for flights. “It’s late into March, and we had to do it before the ice condition deteriorated,” Koski said. Sea ice begins to melt more as 24-hour sunlight returns in summer.
“Every day you wake up, and the pilots decide if the day is good to fly,” he said. “Everything’s ready—you pack up and go.”
“The pilots have done it before, and they know what they’re looking at,” Koski said. “They land somewhere and walk the ice, putting out black trash bags filled with snow to mark a runway—in case they need to take off in bad weather or another plane needs to find the runway the next day.”
Twin Otters carry a 2,000-pound payload, including people, equipment, and fuel, Koski said, so five people made up about half the load. Each flight to an ice location took two hops, with a stop to refuel on ice five to ten feet thick.
“Sometimes, when a team intended to overnight on the ice, they took a bear dog in the plane,” Koski said. “They hired a trapper or hunter from town, and his dog, to go out with them. The dog sleeps on a pallet outside the tents and will whine or bark if it smells a polar bear.”
Koski and Kemp—WHOI’s Moorings Operations Group leader—used an auger to drill holes through the ice and install pairs of small buoys at intervals from 24 to 240 miles away from Banks Island.
“We did the farthest point first, so we didn’t get stranded, and made hops on the way back where we could refuel,” Koski said. “The pilots like to help out. They’re interested, and everyone depends on each other. If anything happens to you, you’re two days from medical help.”
Each buoy connnected to a long cable fed through the drill-hole. Each cable carried a transducer suspended within the sound duct, 328 feet down. Every four hours, the transducers sent out sound signals at a frequency of 900 hertz, about the top of a soprano’s singing range.
“The signal levels are kept as low as possible to conserve energy, and span less than one minute every four hours, minimizing potential environmental impact. In addition, the sources are never operated in sensitive areas near the Alaska coast,” Freitag said.
“We’d land, get the auger set up, twenty minutes to drill the hole,” Koski said. “Someone stretches out the equipment and cable, so the buoy is a hundred meters away from the hole. Make final electrical connections at that point, then put the transducer into the water and turn it on. When we hear that it’s working, we drag the buoy to the hole, which lowers the transponder as you walk, and we set the buoy onto the hole.”
“The ‘go, no-go’ point is if you can hear the sound signal with your ears,” he said. “If it’s working, you can hear it. If yes, then you get back on the plane and go.”
Warming above and below the ice
Freitag was watching on his laptop from the United States, and WHOI scientist Steve Jayne was on Banks Island, when the first signals from the ice buoys deployed by Kemp and Koski reached them. Signals transmitted via satellite from all eight buoys came through.
“In the course of a weekend, they had put eight buoys in, and the buoys were all able to talk to each other,” Freitag said. “In a short time, we went from not being positive that it would work for more than a hundred kilometers, to ‘Wow, this works at a few hundred kilometers!’ We were all very, very pleased!”
That July, researchers from the University of Washington launched gliders from a boat out of Prudhoe Bay, Alaska, to test whether the gliders would communicate with the buoy system. The gliders traveled up and down through the ocean gathering temperature data. They detected and responded to signals from the WHOI buoy system—but only when they were within the boundaries of the 328- to 984-foot (100- to 300-meter) sound duct.
“We learned that you have to be able to synchronize the time when the transducer’s beacons transmit to the time when the gliders are up in that layer of water—otherwise, they don’t hear it,” Freitag said.
Ironically, the Arctic sound duct that researchers may now use to gain understanding of the region’s rapid climate change is being strengthened by that very same climate change.
“Data show that over the last thirty years this warmer layer has gotten warmer,” Freitag said. “And so the strength of this sound propagation duct in this part of the Arctic has grown, enabling this sound propagation.”
“What happens in the future, that’s not clear,” he said. “But regardless, the warm-layer sound channel took some time to form, and it’s not going to go away very soon—given that the temperature of water in the Bering Sea coming into the Arctic has gone up as well.”
“The change in Arctic temperature is absolutely what has enabled this Arctic acoustic network to actually work the way that it does,” Freitag said. “But in the middle of the winter, there’s still going to be ice. No matter how open the Arctic gets in the sumer due to melt-back, it’s still going to freeze in the winter.”
Robotic vehicles could be gathering data under that winter ice, navigating via an under-ice communications system that transmits the data back to scientists warm and snug in their labs.
The development and field program was part of the Marginal Ice Zone Departmental Research Initiative funded by the Office of Naval Research.
Slideshow