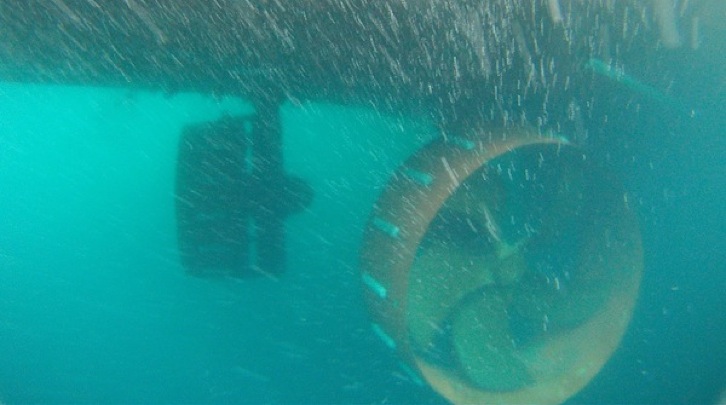

September 15, 2011«Knorr»s maskineri består av tre kraftige dieselmotorer, som driver store generatorer. Disse generatorene produserer strøm til lys, varme og så videre, men også til skipets fremdriftsmaskineri. Motorene som driver propellene til skipet, er nemlig elektriske. Dette kalles dieselelektrisk drift. «Knorr» drives fremover av to såkalte Z-drev, eller bare "thrustere", om man vil. Dette er, enkelt forklart, propeller som står i en slags dyse, hvor dysen kan svinge fritt rundt 360 grader. Navnet Z-drev kommer av at akslingen som driver propellene, har to 90 graders "knekk" for å nå fram til propellene.
Sammen med en lignende, litt mindre, baugpropell av samme type, gjør dette at «Knorr» kan bevege seg i hvilken som helst retning i horisontalplanet. - Vi kan bevege oss rett sidelengs om vi ønsker, sier kaptein på «Knorr», Kent Sheasley. Å styre et skip from Sindre Skrede on Vimeo. - Systemet med Z-drev er essensielt for et fartøy som dette. I tillegg til en fantastisk bevegelsesfrihet, har vi også mulighet til å holde posisjonen vår med stor nøyaktighet, selv i høy sjø, sier han. «Knorr» kan holde seg i posisjon med én meters nøyaktighet selv i sjø med bølger opp til tre meter. Over det går det ut over nøyaktigheten, men skipet kan likevel holde posisjonen forbausende godt.
- Bruker vi alle tre thrustere for å holde posisjonen, vil propellene spinne med rundt 50 omdreininger per minutt. De vil peke inn mot midten av skipet, og jobber på en måte mot hverandre for å holde skipet i posisjon. Merker systemet at skipet kan drive av på en eller annen måte, korrigeres dette straks, sier Sheasley. Systemet er utviklet av norske Kongsberg Marine. En komplett modell av «Knorr» er programmert inn, slik at systemet vet hvordan ulike krefter vil påvirke skipet. Ved hjelp av sensorer så som vindmålere, gyrokompass, GPS samt et komplekst instrument som regner ut skipets stilling og egentlige posisjon, kan systemet ikke bare korrigere for uønskede bevegelser, men også forutse dem.
Når systemet for eksempel måler et vindkast, vil det fortløpende beregne hvordan vindkastet vil virke inn på skipet. En eller flere av thrusterne vil så bli styrt i riktig retning, og nødvendig kraft vil bli gitt for å hindre at skipet beveger seg på slik det ikke skal. Siden skipets antenner og sensorer hele tiden er utsatt for skipets bevegelser, er det tvingende nødvendig for autopiloten å finne skipets "senter" - eller regne ut skipets nøyaktige posisjon hele tiden. En GPS-antenne montert i skipets mast, vil svinge mange meter fra side til side, og gi forskjellige posisjonsangivelser, selv i moderat sjø. Dette tar systemet hensyn til, og regner kontinuerlig ut skipets eksakte posisjon. For CTD-arbeidet som nå foregår, er ikke det å holde én bestemt posisjon det viktigste. Nå er det det å følge sjøens bevegelser som gjelder. Mannskapet legger skipets baug mot vinden når vi kommer til en målestasjon. CTD-instrumentet låres, og mannskapets oppgave er så å sørge for at wiren til CT-en er stram og rett hele tiden. Med andre ord ønsker man i størst mulig grad å følge strømmen som virker inn på instrumentet der nede i dypet.
- Dette er både for å gi forskerne bedre villkår for målingene sine, men også fordi vi ønsker å holde kabelen borte fra skroget. Det vil ta litt tid, men om kabelen gnurer mot skroget, kan den faktisk gnage seg gjennom stålskroget til slutt, sier Sheasley. I følge sjefsforsker Robert Pickart er nøyaktig navigering svært viktig for målingene. - Vi ønsker naturligvis å foreta målingene så nært som mulig opptil den posisjonen vi har planlagt, men er også avhengige av at CTD-en følger strømmene nedover i dypet, slik at linjen den går langs blir mest mulig loddrett. Uten et skip med så nøyaktige muligheter for posisjonering som «Knorr», hadde dette blitt svært vanskelig, sier han. «Knorr» var tidligere utstyrt med Voith Schneider-propeller, et nokså spesielt system hvor "propell"strømmens retning kan endres umiddelbart. Dette ble dog byttet ut da skipet ble bygget om i 1991. Systemet fungerte den gang utmerket til å holde posisjonen og lignende, men medførte uønskede vibrasjoner i skroget under fart. http://en.wikipedia.org/wiki/Voith_Schneider_Propeller
Ekspedisjonen drar nå lengre og lengre sørøstover, og vil i løpet av få dager komme frem til Færøyene. Last updated: December 27, 2011 | |||||||||||
Copyright ©2007 Woods Hole Oceanographic Institution, All Rights Reserved, Privacy Policy. | |||||||||||