
Let There Be Light in the Dark Depths
A conversation with WHOI engineer Jonathan Howland
Jonathan Howland has worked as an engineer for 20 years in the Deep Submergence Lab at Woods Hole Oceanographic Institution, primarily developing systems for remotely operated vehicles. He led efforts to create the cameras and lights for the new Nereus vehicle.
[Fourth in a series of interviews with five WHOI engineers who developed the new deep-sea exploration vehicle Nereus, which successfully dove to Challenger Deep, the deepest part of the ocean, on May 31, 2009.]Oceanus: Many people might think that oceanographers use lights on deep-sea vehicles like headlights on cars: to see where they are and where they’re going. That’s not exactly right, is it?
Howland: We use lights to see where we are going, and what is right around us, but we can’t illuminate a very big piece of the seafloor at once. It’s hard to imagine how much you’re not seeing at any one time. If I told you to find a particular rock in a large field on a pitch-black night with a flashlight, it would take you a long time to find it. Your batteries would probably run out first. The lights on the vehicle exist solely for illumination for the cameras.
Oceanus: When you go under the ocean, how quickly do you need lights?
Howland: At night, right away. In the day, as soon as you get beyond the point where sunlight can penetrate. Even in the clearest water, beyond very shallow depths, you can’t effectively use any camera. Anything past 1,000 meters, it’s totally black. The only light is the light that we bring with us.
Oceanus: What kind of lights do you bring on Nereus?
Howland: When I started doing this kind of work years ago, we used strobe lights that would take ten or twelve seconds to recharge before we could take another picture. We thought that was pretty good at the time. With Nereus, we took advantage of advances in the electronics industry in high-brightness LEDs, or light-emitting diodes. LEDs are components of all sorts of everyday devices. Probably several conventional LED’s light up in your car to show you that something is on, or has a problem. You’re starting to see high-brightness LEDs in traffic lights and computer screens.
The LEDs give us many advantages for underwater use: They are very bright. They tolerate pressure. They are small point sources of light, so you can aim them where you want. You can also turn them on and off quickly, so that we make light only when we need to.
Oceanus: Why is that critical?
Howland: Unlike other remotely operated vehicles, Nereus doesn’t have power coming to it via a cable. It’s supported solely by batteries. We need to conserve battery power by making light only when necessary.
If you don’t need to look at something all the time, you don’t want to make light all the time. To save power, if the camera shutter is open for only 10 milliseconds, we only make 10 milliseconds’ worth of light. If the vehicle is driving above the seafloor, and there’s featureless mud that you don’t need to look at closely to study or sample, you don’t need to see images continually at the conventional video camera rate of 30 frames a second. You can slow down the shuttering rate and lighting, and see the seafloor as a set of still frames. When we get to something we really want to examine, we can speed up the cameras and lights to observe full motion.
And beyond our power constraints, we also didn’t have the payload on Nereus to bring down many different types of cameras. Typically, underwater vehicles carry both a still camera and video cameras, each of which is optimized for different tasks. We compromised and built a reasonably high-quality still camera that could run at a higher rate of 30 frames per second to get video-type imaging.
Remember that Nereus is a hybrid vehicle that operates as a tethered remotely operated vehicle (ROV) and also as a free-swimming, autonomous underwater vehicle (AUV). We had to take a different approach for AUV mode.
Oceanus: Would you explain how?
Howland: First, you have to understand that light doesn’t behave the same way in water as it does in air. Different frequencies of light get filtered out by the water at different rates. For example, red light is absorbed by water very quickly. You can make all the red light you want, but you’ve wasted your power making light you don’t use because it doesn’t penetrate far enough.
When Nereus is in its AUV mode, we’re flying the vehicle higher above the seafloor, taking snapshots as we drive along to make maps of broad areas. We use only blue-green light, because it penetrates through water better than other frequencies. The camera we use is sensitive to the same blue-green light that we’re putting out. This lets us get more range for the same amount of power. But the trade-off is that because we are sensing only one band of light frequencies, we only get monochromatic, black-and-white images.
Oceanus: And when Nereus changes into its ROV mode?
Howland: We change the lights and camera and run them more or less continuously with white LEDs that emit a wide range of frequencies. When Nereus is an ROV, we are examining and manipulating things at close range. Pilots need to see continuously when they use the manipulator arm to perform tasks, and human brains need color to recognize and discern things.
Oceanus: Would you describe the lighting apparatus?
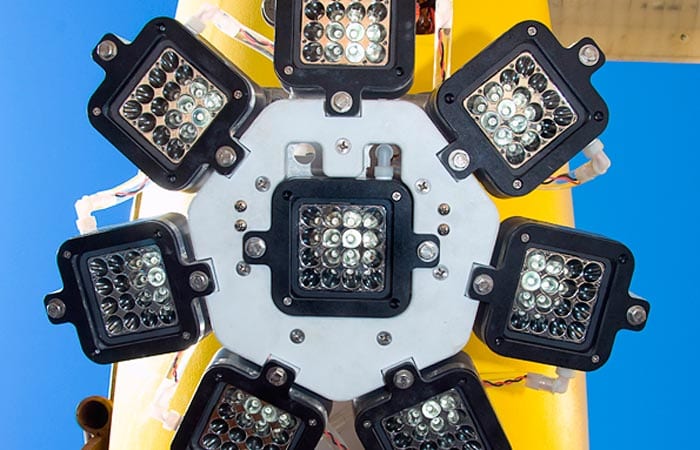
Howland: There are several pieces to it, and many teams of people were involved. A WHOI engineer named Norman Farr designed what we call “pucks, in which there are 16 LEDs nestled in a parabolic reflector coated with a shiny reflective surface. Another team worked on a custom piece of electronics to control the lights. That controller, which draws power from Nereus’s battery system, has to emit pulses of light, triggered by the camera. The whole assembly goes into a pressure-compensation system that keeps water out and is filled with non-conducting fluid that doesn’t compress like air and compensates for the pressure 11 kilometers under the water.
Oceanus: No doubt you encountered unanticipated problems.
Howland: We found out things along the way that we didn’t know would happen. For example, the oil we thought we were going to use to pressure-compensate the system actually ruined the sealants on the LEDs. We had to find a substitute that worked, and that was another team effort.
—Interview conducted by Amy E. Nevala and edited and condensed by Lonny Lippsett
Funding to develop Nereus was provided by the National Science Foundation, the Office of Naval Research, the National Oceanic and Atmospheric Administration, the Russell Family Foundation, and Woods Hole Oceanographic Institution.
Slideshow

