Reaching Up Into Perilous, Icy Waters
The 'Arctic Winch' sends sensors toward the underside of sea ice—and back again
A year had passed since we deployed our mooring in the western Arctic Ocean, which is a long time to ponder the fate of an instrument in a stormy and ice-infested ocean. The wait becomes even more nerve-wracking when you know that your instrument relies on new technology that had not survived previous tests in such conditions.
The goal of our research seemed simple enough: to use a mooring anchored to the seafloor to reach up and sample the upper layer of water of the Arctic Ocean for an entire year. Mooring technology has been tried and tested for four decades, but the Arctic poses unique challenges.
Even in an apparently calm, ice-covered ocean, the environment is constantly in motion. Winds and currents make ice floes collide, forming large undersea ridges that can protrude 10 to 30 meters (50 to 100 feet) beneath the water’s surface. Consequently, sub-surface mooring instruments that extend into the topmost layer of the ocean risk getting smashed or dragged away.
Yet critical oceanographic phenomena occur in that upper portion of the water column—including ones that maintain a delicately balanced “shield” between the ice cover and deeper, warmer water masses that could melt the ice.
In and out of harm’s way
Oceanographers have used buoys attached to the sea ice to get useful information over the years, but such buoys drift at the whim of winds and currents. They cannot sample a single location for more than a brief period. As a result, there is a void in our knowledge of the upper Arctic Ocean. For these reasons, engineers at the Woods Hole Oceanographic Institution (WHOI) developed the “Arctic Winch,” a device that can allow us to get in and out of icy surface waters from below.
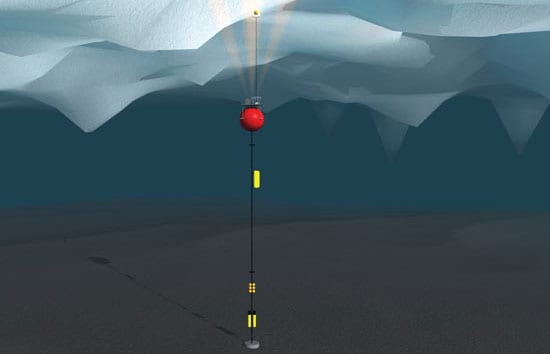
To the large top-float that keeps a subsurface mooring upright, they attached a small buoyant float, which carries instruments to measure water temperature, pressure, and salinity. At regular intervals, the small float is released and allowed to rise on a tether either to the ocean surface (when no ice is present) or to the underside of the ice.
The float’s pressure sensor detects the rising motion, so if the float bumps against the underside of an ice floe, the sensor triggers a winch on the mooring’s top-float, and the small float is immediately reeled back down to the subsurface mooring, where it can remain out of harm’s way until the next cycle.
An oceanographically strategic location
In the summer of 2003, we deployed a prototype of the Arctic Winch on the continental slope off northern Alaska, where Pacific Ocean waters entering the Arctic Ocean through the Bering Strait are channeled in a very narrow current that flows eastward along Alaska’s northern boundary in the Beaufort Sea. We chose that location to measure how the waters escape off the upper continental slope into the deep interior of the Arctic Ocean basin.
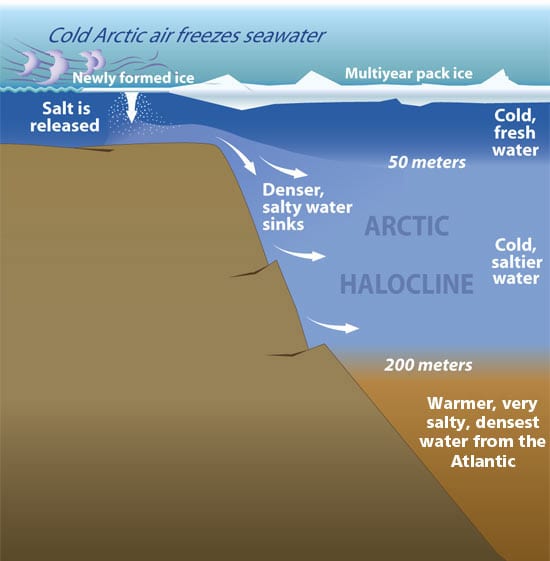
Along the pathway from Bering Strait to the Beaufort Sea, the Pacific waters are modified. (See “Flying Blind Into the Ice Factory.”) Cold winter air freezes seawater into ice, which releases salt into surface waters. These cold, salty waters become dense enough to sink, ultimately finding their way into the Arctic Ocean’s interior, where they create an intermediate layer called the halocline (from the Greek words for “salt” and “slope”). Halocline waters, between 50 and 200 meters (165 and 650 feet) deep, lie between the surface and an even deeper layer of denser—and warmer—waters that flow into the Arctic from the Atlantic Ocean.
A shift in the amount of salt that gets transferred from the continental shelf to the deeper basin, via the boundary current, could alter the halocline and allow the heat stored below to begin to melt the ice cover. Measuring the uppermost part of the water column would provide important insights into this possibility.
Unfortunately, in our first attempt to use the Arctic Winch, we came up empty-handed—literally. When we pulled the mooring out of the water, there was no trace of the buoyant, retractable float. We later learned from the engineering data on the top-float that the device worked well for eight months before unexpectedly losing power while the float was in its “up” position, somewhere between the ice and the top-float at 40 meters (33 feet) depth. We surmised that it was ripped loose by passing ice and is still floating somewhere around the Arctic, with eight months of lost data.
If at first you don’t succeed…
With funding from the WHOI Ocean and Climate Institute, we deployed the next-generation Arctic Winch in the summer of 2005, which included two critical improvements. Before each ascent toward the surface, the instrument runs a self-check of the power level in the winch system; if the level is too low, the ascent is terminated. And at the end of each round-trip, data are transferred to a recording system, or “logger,” on the top-float, ensuring that at least some data will be returned if the retractable float is lost.
Despite the new safeguards, there was no small measure of apprehension when it came time to retrieve our mooring in the summer of 2006. Would we be skunked again, or would we fill in a small piece of the Arctic climate puzzle?
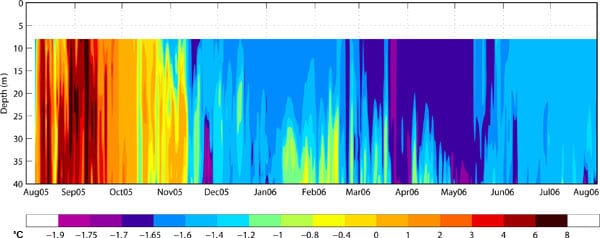
Thankfully, the Arctic Winch was safely in its cradle on the top-float when we recovered the mooring in August 2006. Better still, the device returned a rich dataset. Since the Arctic Winch collects measurements from many points on its up-and-down journey, we now have the first high-resolution view of the mostly inaccessible top part of the water column above the Arctic continental slope over all four seasons. More importantly, we now have new technology for the scientific community to measure a crucial part of the Arctic Ocean.
The author acknowledges the Office of Naval Research, and in particular Dennis Conlon, who enthusiastically supported the initial deployment of this mooring. Building of the prototype Arctic Winch was made possible by the generous support of Gratia Montgomery, whose love of oceanography had great impact on many researchers in the WHOI community.
Slideshow