Swimming with Sharks
An underwater robot learns how to track great whites
Amy Kukulya’s clients often have curious requests, but this was among the oddest. As an engineer at Woods Hole Oceanographic Institution (WHOI), she has operated autonomous underwater vehicles beneath Arctic ice in Greenland, in a New Zealand lake to find geothermal terraces submerged by a volcanic eruption, and with Navy SEALS working on underwater docking systems.
So when Kukulya’s boss, Tom Austin, came to her and said, ‘Amy, I’ve got just the project for you,’ it had to be interesting. The project was peculiar—outrageous, actually. They would be refitting one of their autonomous underwater vehicles, or AUVs, to track and film great white sharks. The Discovery Channel was paying for it. For a program for its annual Shark Week.
Kukulya laughed. Were they serious? “It was clearly going to be a very difficult engineering challenge,” she said.
Kukulya wasn’t alone in her doubts. Greg Skomal, who heads the Massachusetts Shark Research Program, wasn’t convinced either. Even Nick Stringer of Big Wave Productions, the would-be director of the show, knew he was rooting for a gamble. “To be honest, I was completely skeptical about whether it would work,” he said. “I really didn’t think it would, and I think a lot of people involved in the project really didn’t think it would.”
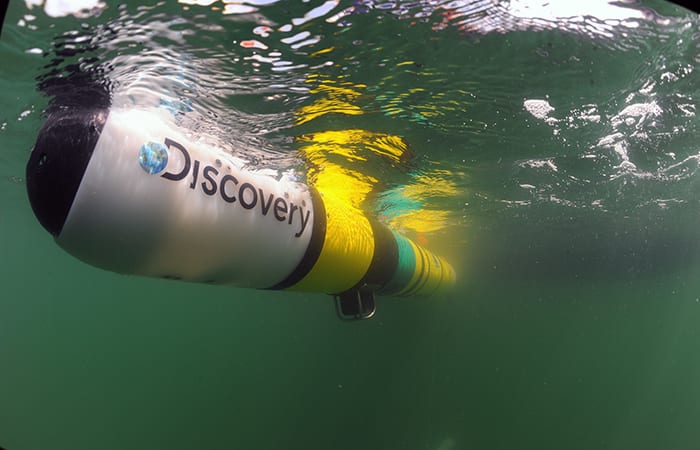
Stringer had brought the parties together and pitched the project to Discovery Channel. The project would use an AUV called a REMUS 100, a sleek, yellow, 5-foot, torpedo-looking vehicle that will debut on Discovery Channel as “Shark Cam.” The beauty of REMUS (an acronym for Remote Environmental Monitoring UnitS) is its low cost and versatility. In the crudest sense, the AUV is like a Mr. Potato Head: Its body usually stays the same, but various sensors are attached with each new undertaking—an avalanche beacon for under-ice escapades, for example, or sidescan sonar for shipwreck hunting.
Different versions of the REMUS 100 had been used to search for underwater mines, to survey the Atlantic continental shelf break for fish, and to examine how ocean currents mix off Cape Cod, but none had ever been used to track a moving animal. REMUS is equipped with sonar and sensors that allow it to use sound to track its position and navigate between points. It is usually preprogrammed to swim along predetermined routes. To track a moving target, the computer brains in REMUS would have to be constantly recalculating the locations of both itself and its target. “It’s a complicated math problem,” Kukulya said.
The only time REMUS had trailed anything in motion was for a system to recover the AUV from an underway ship—with the AUV chasing down and attaching itself to a line trailing the vessel. At least then, the ship was sending REMUS acoustic signals on its position and was moving in a relatively straight line at a constant speed. It was unlikely great whites would do the same.
Despite the apparent implausibility, all parties opted in. For Kukulya, part of the larger team at WHOI’s Oceanographic Systems Laboratory (OSL), it was the chance to work on a fun engineering challenge in her own backyard.
For Skomal, the lure was the data. Scientists know astonishingly little about the simplest of great white behavior, let alone where they migrate, mate, or give birth, or even how long they live. In addition, shark sightings off Cape Cod had increased over the past couple of years, and beach managers were desperate for information.
For Stringer, it was a chance to satisfy his “frustrated scientist at heart” and to film a very good story. “I got really excited,” he said, “because it’s always been something that’s been talked about in the circle of underwater filmmakers that I know, but no one had really attempted it.”
All parties were skeptical, but on board. So was Discovery. Almost. “They were sufficiently excited,” said Stringer, but “they weren’t going to give us all the money. Not without some sort of trial.”
≋
The concept of Shark Cam actually began long before Discovery and Stringer caught wind of it—in 2008, in a Woods Hole coffee shop, with Cabell Davis, a WHOI biologist, ruminating with OSL engineer Gwyneth Packard. Davis said that he always wanted to see if a REMUS could follow a basking shark, so that he could find out if the planktivorous fish sought out plankton “clouds,” or areas of high plankton concentration.
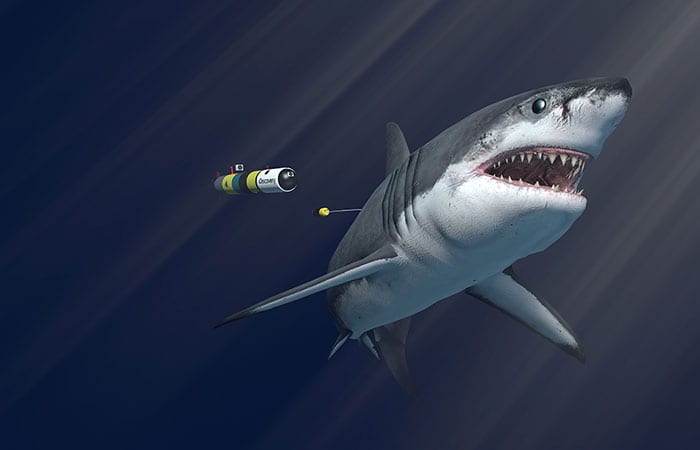
With a small grant from WHOI, Packard and a team altered REMUS’s computer algorithms so that the target guiding the vehicle’s trajectory would not be a stationary location, but an ever-changing one—in the form of an instrument called a transponder that emitted acoustic signals that REMUS could “hear.” The shark would be tagged with a transponder.
The team installed a key component into REMUS, a navigation system that could hear sounds coming from any direction. REMUS would send out “pings” of sound (“Marco!”), and the shark’s transponder would reply (“Polo!”), giving computers inside REMUS information to calculate the shark’s distance and bearing. Because sharks move through three-dimensional space, REMUS also needed data on depth, which its navigation system normally didn’t procure. The OSL team programmed the transponder to send out a second ping; processing the time delay between the first and second pings, REMUS could calculate the shark’s depth.
To test the system, the team put REMUS in local waters and hung the transponder off a boat. If everything went according to plan, REMUS would calculate its distance from the transponder regularly and communicate it in a timely manner to the engineers on the boat. Sometimes, “the vehicle would be out to lunch and go the other way,” said Kukulya, but all in all, the team was excited to find that the system worked.
But to convince Discovery, REMUS needed to track and film its first live animal—Greg Skomal. Using a dive scooter with a transponder attached, Skomal would swim predetermined patterns so the team could see how well REMUS followed and how quickly it reacted to changes in trajectory. REMUS not only had to follow, it had to act as an autonomous cameraperson, following precisely enough to keep its target in view of its cameras.
“There was this big nail-biting. Is it gonna work?” Kukulya said.
REMUS had a few issues. Within a 66-foot radius of its target, REMUS was programmed to slow down, but outside that radius, the team had little control over its speed. Despite the hang-ups, REMUS tracked Skomal, and the team delivered on the video footage.
“That’s when we really realized it could work,” said Kukulya, but did Discovery? “We had no idea if they were gonna fund the next phase,” she said. A three-month lull ensued, then Discovery bit enthusiastically.
“Lots of people have talked about it, but they were prepared to put the money in and see if it works,” Stringer said. Once Discovery gave the green light in early 2012, “it was like high gear the whole way,” Kukulya said.
≋
The following month at OSL whizzed by for the REMUS engineers. Packard and Roger Stokey worked on software—fine-tuning REMUS shark-approach tactics and eliminating the transponder’s blind spots. Tom Austin perfected acoustics, while Michael Purcell and Robin Littlefield tweaked the transponder and REMUS’s nose, which held the camera housing.
“We realized we had no idea how the sharks were going to operate and behave,” Kukulya said. The team grilled Skomal for insights on shark behavior to improve REMUS’s mission programming. Early REMUS projects were programmed to swim a specific mission and given only one other option: to abort. “Now we have the ability to send them new missions and new commands on the fly, but we have to know what those are specifically going to be ahead of time,” she said.
April came too soon. Basking sharks, which arrive off Chatham, Mass., in midspring, would serve as the test dummies for the great whites, which come in midsummer. “We were sitting in the lab until midnight getting the pieces out of the shop and all put together and heading out to Chatham at 4:30 in the morning,” Kukulya said. Even as the boat left the dock, Kukulya was still tinkering with the transponder’s burn wire—the part of the instrument that allows it to disconnect from the shark. From the boat, the team could send an acoustic command to the transponder and, through a series of chemical reactions, the wire heats up and burns through, releasing the transponder to float to the surface.
The plan was to use a plane and pilot, George Breen, to spot basking sharks and radio their whereabouts. Kukulya had expected dorsal fins skimming the surface, but no fins appeared. When Breen finally spotted their first basking shark, the boat approached it, Skomal attached the transponder, and the OSL team released REMUS. Then the shark dove with the transponder, and it was lost.
Morale went the way of the transponder. “We were totally disheartened,” Kukulya said. Shark No. 1 had been a failure, and curiously, the spotting plane was nowhere to be found. Without it, the team had little chance of sighting a shark. Bad weather was also rolling in. ‘It’s never going to work,’ thought Kukulya as she rocked about in the rough water and tinkered with a transponder.
Suddenly, someone on the bow was screaming. “We literally almost ran over a basking shark,” Kukulya said. Skomal quickly hopped into position while Kukulya rushed to get the transponder to him and get REMUS ready.
“Somehow we tagged the basking shark,” Kukulya said. And then REMUS tracked it.
“Amy, me, maybe Tom, Roger, we were pretty darn surprised,” Skomal said. “I know Stringer and I were like, ‘Holy mother! This worked! High fives all around!’ ”
After several more tests on basking sharks, REMUS was getting closer to being great-white-ready. “Every time we went out, the algorithm had improved.” Kukulya said. “The system worked better each time: from being towed by the boat, to getting on the scooter, to being on the basking shark.”
With each shark, the software team was making leaps and bounds. On the hardware end, OSL engineers increased the voltage to the burn wire so that it burned in half the time. They also incorporated a depth-activated auto-release mechanism into the transponder to release it when a shark decided to dive.
≋
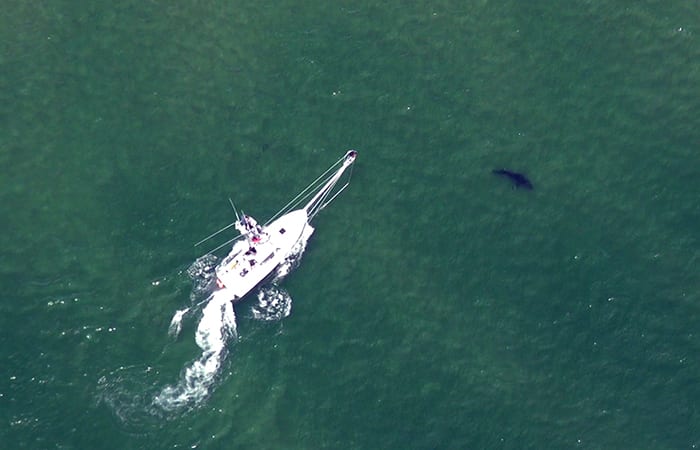
It was great white time. The team hired F/V Ezyduzit, a “shark-hunting” boat run by captains Bill and Nick Chaprales, professional harpooners who could apply the tags. As Ezyduzit pulled up to the tagging site, Kukulya homed in on a potential problem: the waves. The site was in shallow water right near the beach. Acoustically speaking, this was a cacophonous place for an underwater vehicle that uses sound to navigate.
“As the plane started calling in the first shark and we started heading in toward the beach, I saw how the game was gonna begin,” Kukulya said. The plane radioed in the shark’s location and trajectory, picking a shark that was heading toward shore, “because the way the harpoon shark-tagging works, and what I didn’t understand, was that the sharks don’t come up to the surface,” she said. The great whites hugged the ocean floor; in shallow waters, they would be close enough to the surface for the harpooners to tag them.
“It was pretty exciting just watching these guys do their thing and the guy on the pulpit being really calculated and patient,” Kukulya said. “And there it is, in like ten feet of water, there’s a shark, and boom!”
With one swift swoop, the harpooner affixed the tag. The shark responded well and continued swimming. Kukulya began tracking REMUS and its prey on the computer. “We knew from the data that we were getting really close to the shark,” she said. “We were super-excited.”
Then, slowly, she began to worry: Was the camera really working? “The film crew might not think we did so great if there is no video,” she said.
As REMUS was recovered on board, she waited nervously as the footage was downloaded off REMUS cameras, sorted in the cabin, and then put on a big screen. Skomol, Stokey, Kukulya, Greg Packard, and the Ezyduzit crew watched as REMUS rolled through turbid green waters. The film crew stood by awaiting their reactions.
“It was kind of dull, and you think, ‘Wow, this is not gonna make very good TV,’ ” Kukulya said. A striped bass came into view, “and then all of a sudden, up in the distance, the wag of the fin, and then, you know, REMUS is getting closer and closer. Then you see REMUS bounce off the shark, and you’re like, ‘Wow, that’s a little too close!’ We just, of course, blew up excited. We succeeded!”
≋
Not bad for something no one thought was possible. Still, it’s a long road ahead. OSL will always be striving to make REMUS “more fishlike” in its algorithms and to improve acoustic communications, so that it can swim not only with the sharks, but like the sharks. REMUS becomes a film star this week on the Discovery Channel, and it’s already booked for its next film gig in the clear waters of the eastern Pacific off Guadalupe, Mexico. This will theoretically enable better footage, but may also allow REMUS to explore one of the biggest great white mysteries—mating. Scientists have noticed bite marks on the females in the area, a possible sign of violent courtship, but no one has ever observed a pair mating.
OSL is prepping big-time. The Mexico expedition may include two REMUS vehicles. Next season’s upgrades will allow the equipment to act faster and go deeper. That pesky burn wire will now take a second or less to release the transponder in case the sharks dive. Communication between the transponder and REMUS will occur every two seconds, instead of three. The transponder and new camera housings will be able to go to deeper depths. The transponder will also get a tail for hydrodynamic streamlining and will even get a viewport with a camera. In an effort to make REMUS a better cameraperson, the team will upgrade the cameras and add an extra one on REMUS’s underside for a total of five. The shipboard tracking system is also getting a facelift that will enable the team to better track the relative positions of the shark, REMUS, and boat.
Perhaps the most exciting adjustment for Shark Week fans will be OSL’s improvements to REMUS filming time. REMUS’s time-in-water was originally limited by the cameras’ battery life—three to five hours. New cameras will be able to run off REMUS’s own power supply for eight to nine hours. That’s good news for shark scientists, as well. Skomal’s dream is an AUV that can track sharks over the long term, and, in the process, figure out ways to conserve the increasingly endangered animals.
Scientists estimate that 100 million sharks are killed annually, many to supply the rapacious market shark fin soup, an Asian delicacy and cultural icon. As top predator in the ocean food chain, sharks play a crucial role in ocean ecosystems, and their disappearance would disupt the balance and have large, unanticipated cascade effects.
“As REMUS films,” Stringer said, “it also maps the seafloor and records ocean temperatures, depths, currents, and other environmental conditions that provide incredibly valuable data for the likes of Greg. By transferring SharkCam tracking technology to deeper-diving REMUS vehicles, we could follow a whole array of marine life,” said Stringer, who has already discussed plans with WHOI biologist Michael Moore to track whales diving and hunting at depth. “There are still so many unanswered questions that SharkCam could help us understand.”
“The more fish that I tag, the more I realize they go to areas where I have no clue what the hell they’re doing,” Skomal said. Many head to remote areas, where it would be costly to send a research vessel.
“Maybe I could send a robot,” he said.
Slideshow