New underwater vehicles in development at WHOI
Vehicles will be modeled after WHOI’s iconic remotely operated vehicle, Jason
Estimated reading time: 4 minutes
Design and construction began in the fall of 2024 at WHOI on two new medium-sized, remotely operated vehicles, known as mROVs, that scientists will use for studies of near-shore to offshore marine areas up to 2.5 miles (4,000 meters) deep. Agile in the water and more readily transported between study sites, the vehicles — each the size and weight of a small sport utility vehicle — represent the next generation of a robotic marine science powerhouse, ROV Jason, which has completed thousands of deep-sea missions in the Atlantic, Indian, and Pacific Oceans.
The new vehicles, one of which will be operated by the National Deep Submergence Facility (NDSF) at WHOI and the other by the University of Southern Mississippi as part of the Ocean Exploration Cooperative Institute, offer expanded access to the deep sea. Both operating institutions will provide new opportunities not only for deep-sea scientists but also by training an emerging generation of early-career engineers, some of whom have not previously had routine access to oceanographic research vehicles.
Like Jason, the mROVs will be designed and built by WHOI’s Deep Submergence Laboratory engineers. They are funded at a cost of more than $5.5 million each by the National Science Foundation, the National Oceanic Atmospheric Administration Office of Ocean Exploration, and the NOAA Mesophotic and Deep Benthic Communities (MDBC) restoration projects. The vehicles are expected to be ready for sea trials in 2026 with the first full year of science operations in 2027. Both will have similar operating systems to Jason, which scientists and ship-based pilots manipulate remotely by sending commands via a miles-long fiber-optic tether. The same cable provides power and sends back live video imagery and science data.

Members of the mROV team test a hydraulic power unit for use in the vehicle. L to R: Molly Curran, project lead; Ben Tradd, systems integration lead; and Mario Fernandez, mechanical lead. (Photo by Ken Kostel, © Woods Hole Oceanographic Institution)
The mROVs, which can be operated from smaller vessels and with fewer operators, will also be equipped with sonars, lighting, and numerous sampling systems. Like Jason, their manipulator arms will collect samples of rock, sediment, or marine life and place them in the vehicle’s basket or on “elevator” platforms that float heavier or larger loads to the surface.
The mROVs will be built by a team of nearly a dozen mechanical, electrical, operations, and engineering experts from the NDSF and construction will be hosted at the at the Autonomous Vehicles and Sensor Technologies laboratory on WHOI’s campus, in collaboration with Greensea IQ, an ocean robotics firm in Plymouth, Mass.
The vehicles came to be following a study by the Deep Submergence Science Committee that highlighted scientists’ need for a broader mix of more maneuverable and less expensive vehicles available through the NDSF. This federally funded center operates and maintains three underwater vehicles for oceanographic research, including Jason, the human-occupied vehicle Alvin, and the autonomous underwater vehicle Sentry.
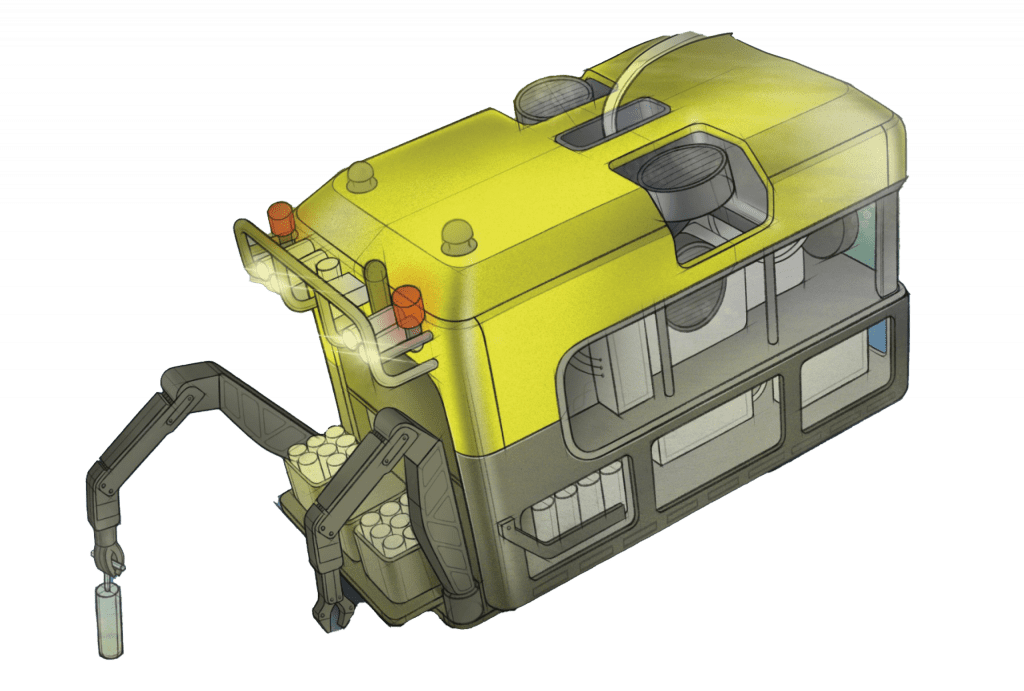
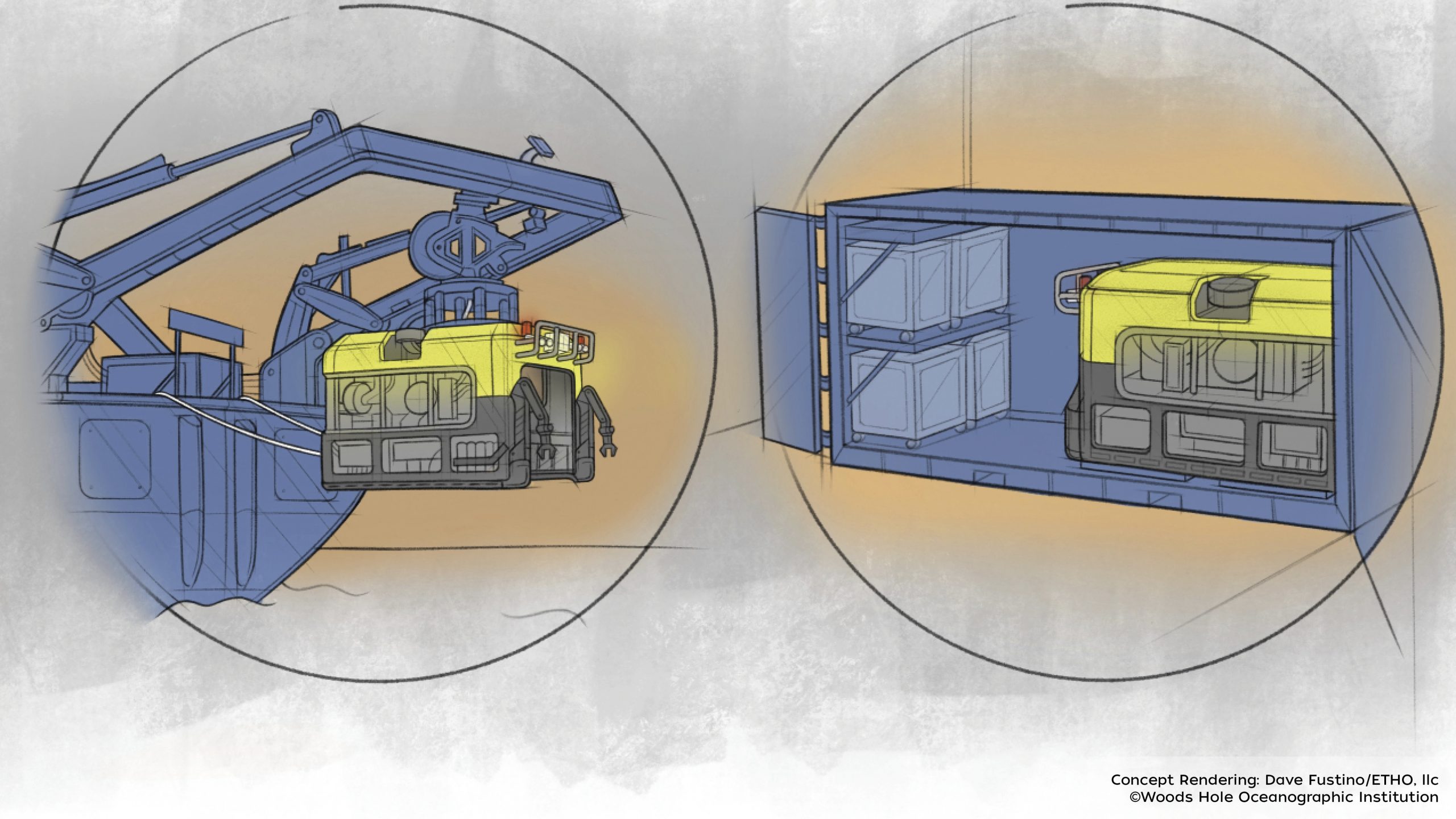
(Rendering By Dave Fustino/ETHO, LLC/©Woods Hole Oceanographic Institution)
“We need platforms that fill the niche between large, working-class vehicles such as Jason and small vehicles used primarily for observation, while still retaining the functions scientists need to conduct leading-edge work in the deep ocean,” said NDSF director Andy Bowen. Jason has been “fully scheduled and oversubscribed for decades,” Bowen said, averaging 161 days of use annually—which is at the high end for routine use of the vehicle.
Size and weight are key considerations for the new vehicles. When Jason went into the field two decades ago, “it was a svelte 6,000 pounds,” Bowen said. Now it weighs 10,000 to 11,000 pounds due to modifications required to meet the routine maintenance requirements of the Regional Cabled Array as party of the OOI off the coast of Oregon. “We don’t always need the heavy-lifting capability of Jason, so the mROVs will give the community more options,” Bowen said.
The development of the mROVs is motivated by the forthcoming availability of three NSF-funded regional class research vessels, which are scheduled to enter the fleet in the next few years, according to Anna Michel, chief scientist of the NDSF. These smaller ships, each about 200 feet in length, are intended to support research on the coastal and near-shore waters that are among the most complex and rapidly changing parts of the ocean. “The mROVs will enable new scientific discoveries by increasing accessibility to the deep ocean,” Michel said.
The vehicles’ size will reduce the space needed on ship decks and require only two 20-foot shipping containers for transport between ports, reducing overall costs and personnel needs, said Molly Curran, lead engineer at WHOI on the mROV project. (Other vehicles, such as Jason, can require up to five shipping containers and customized vehicle launching equipment, such as portable cranes). The mROVs will be launched overboard using the ship’s existing crane or an on-board A-frame.
“Our goal is to have super-capable, less-complex vehicles on smaller ships, and operating with a smaller support team, which will make everything more cost-effective,” Curran said.
In addition to providing more opportunities to conduct advanced, ROV-supported operations, the integration of two mROVs into the research and resource management communities will also help spur growth within the ocean-based blue economy workforce. The need for maintenance and operation staff will enable NDSF and USM to recruit a larger technical staff to support the mROVs and to create further technical advances in marine robotics.

MEET THE AUTHOR Amy E. Nevala
Amy Nevala writes about ocean science and research, with work for Woods Hole Oceanographic Institution and Bermuda Institute of Ocean Sciences. She has reported for...
Read more