Stephanie Chin
Stephanie Chin
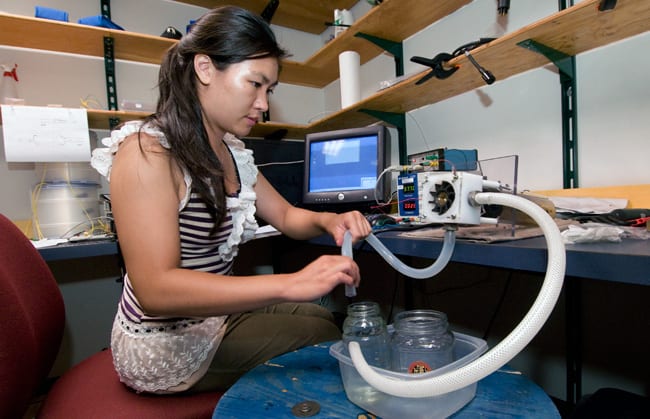
Stephanie Chin is most likely the only Summer Student Fellow whose project could one day operate in space—at least in theory. She worked on building a prototype for a biologic pump sampler for the autonomous…

A Summer of Science on the Sea
It’s no surprise that the Summer Student Fellowship program at Woods Hole Oceanographic Institution (WHOI) is one of the most sought-after gigs for undergraduate science majors around the world. It’s a chance to spend a…