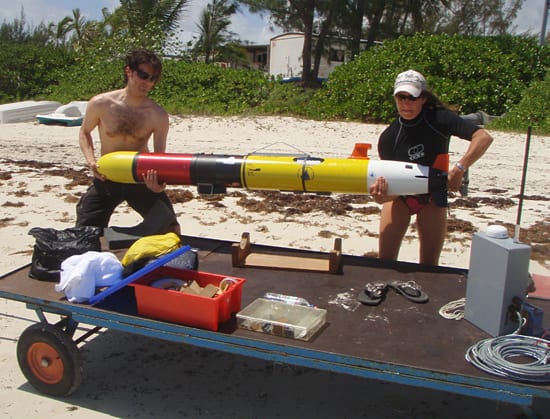
 Working at the WHOI dock, summer student fellow Tess Brandon (Cornell University) and WHOI engineering assistant Amy Kukulya prepare a REMUS autonomous underwater vehicle for a research trip out to the waters off Martha's Vineyard. Working with physical oceanographer Al Plueddemann, Brandon studied the hydrodynamics of a submarine sand ridge. (Photo by Tom Kleindinst, Woods Hole Oceanographic Institution)
Working at the WHOI dock, summer student fellow Tess Brandon (Cornell University) and WHOI engineering assistant Amy Kukulya prepare a REMUS autonomous underwater vehicle for a research trip out to the waters off Martha's Vineyard. Working with physical oceanographer Al Plueddemann, Brandon studied the hydrodynamics of a submarine sand ridge. (Photo by Tom Kleindinst, Woods Hole Oceanographic Institution) At the WHOI dock, Aaron Kayes of the Naval Oceanographic Office (NAVOCEANO) holds the rope line and Frank Raspante of Hydroid, Inc., holds a tail fin as the REMUS-6000 vehicle is lowered into the water for trials and testing. The autonomous underwater vehicle—designed to reach depths of 6,000 meters—was developed and built by the WHOI Oceanographic Systems Lab for NAVOCEANO.
At the WHOI dock, Aaron Kayes of the Naval Oceanographic Office (NAVOCEANO) holds the rope line and Frank Raspante of Hydroid, Inc., holds a tail fin as the REMUS-6000 vehicle is lowered into the water for trials and testing. The autonomous underwater vehicle—designed to reach depths of 6,000 meters—was developed and built by the WHOI Oceanographic Systems Lab for NAVOCEANO.
(Photo by Tom Austin, Woods Hole Oceanographic Institution)- The Ocean Systems Lab group pose on the WHOI dock with a sample of their REMUS (Remote Environmental Monitoring UnitS) vehicles, which are designed for coastal monitoring as well as survey operations at various depths in the ocean. Oceanographers use them as a vehicle to carry a wide variety of ocean instruments for data collection. Computers on the vehicle are used for system control, such as navigation and propulsion, as well as for data collection. (Photo by Tom Kleindinst, Woods Hole Oceanographic Institution)
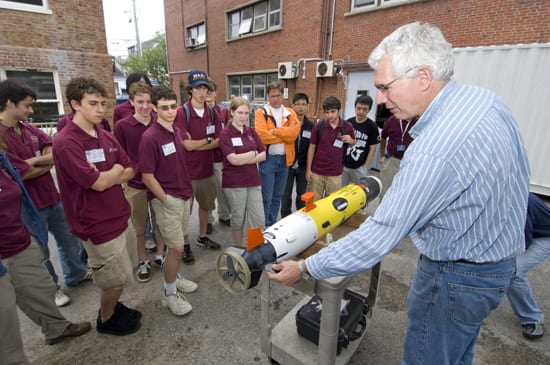
- Ben Allen (right), of the Applied Ocean Physics & Engineering department, shows a group of students one of the REMUS (Remote Environmental Monitoring Units) vehicles, which are designed for coastal monitoring and survey operations at various depths in the ocean. The visiting high school students were participating in the Marine Advanced Technology Education Center (MATE) 2009 ROV Competition.
(Photo by Tom Kleindinst, Woods Hole Oceanographic Institution)  Members of the REMUS 6000 Operations Group Stephen Murphy (right) and Mark Dennett (left) roll out one of two newly-built Hydroid REMUS 6000 Autonomous Underwater Vehicles (AUVs) for transport to Florida. The AUVs, designed and developed by WHOI's Ocean Systems Lab, were commissioned by the Waitt Institute for Discovery as a key component of its new partnership with WHOI. The partnership — called the CATALYST Program — takes an innovative approach to deep-sea exploration by making available versatile and portable deep-sea survey and mapping tools and a WHOI-based operations team, which can be rapidly deployed anywhere in the world.
Members of the REMUS 6000 Operations Group Stephen Murphy (right) and Mark Dennett (left) roll out one of two newly-built Hydroid REMUS 6000 Autonomous Underwater Vehicles (AUVs) for transport to Florida. The AUVs, designed and developed by WHOI's Ocean Systems Lab, were commissioned by the Waitt Institute for Discovery as a key component of its new partnership with WHOI. The partnership — called the CATALYST Program — takes an innovative approach to deep-sea exploration by making available versatile and portable deep-sea survey and mapping tools and a WHOI-based operations team, which can be rapidly deployed anywhere in the world. Oceanographic Systems Laboratory engineer Phil Bouxsein (left) and engineering technician Amy Kukulya lift a Remote Environmental Monitoring UnitS (REMUS) vehicle onto the transport cart. REMUS vehicles are robotic submarines resembling torpedoes that navigate without a human crew onboard and without cables connecting them to research vessels at the sea surface. They are among a class of ocean instruments known as autonomous underwater vehicles, or AUVs. The vehicles are designed for coastal monitoring as well as survey operations at depths to 6000 meters (3.73 miles). Oceanographers use them as a vehicle to carry a wide variety of instrumentation, such as cameras, sidescan sonar and current profilers for data collection. Computers inside the vehicle are preprogrammed and used for system control, such as navigation and propulsion, as well as for data collection.
Oceanographic Systems Laboratory engineer Phil Bouxsein (left) and engineering technician Amy Kukulya lift a Remote Environmental Monitoring UnitS (REMUS) vehicle onto the transport cart. REMUS vehicles are robotic submarines resembling torpedoes that navigate without a human crew onboard and without cables connecting them to research vessels at the sea surface. They are among a class of ocean instruments known as autonomous underwater vehicles, or AUVs. The vehicles are designed for coastal monitoring as well as survey operations at depths to 6000 meters (3.73 miles). Oceanographers use them as a vehicle to carry a wide variety of instrumentation, such as cameras, sidescan sonar and current profilers for data collection. Computers inside the vehicle are preprogrammed and used for system control, such as navigation and propulsion, as well as for data collection.
(Photo by Reed Christenson, Woods Hole Oceanographic Institution) Senior engineer Tom Austin of the Oceanographic Systems Laboratory (OSL) steadies a custom-built REMUS autonomous underwater vehicle as it is raised off its storage platform. In 2003, the specially designed Tunnel Inspection Vehicle was deployed in a New York City aqueduct to help assess the structural integrity of the massive water-delivery system. The OSL team has been asked to make another survey for the city in 2008.
Senior engineer Tom Austin of the Oceanographic Systems Laboratory (OSL) steadies a custom-built REMUS autonomous underwater vehicle as it is raised off its storage platform. In 2003, the specially designed Tunnel Inspection Vehicle was deployed in a New York City aqueduct to help assess the structural integrity of the massive water-delivery system. The OSL team has been asked to make another survey for the city in 2008.
(Photo by Douglas Weisman for Woods Hole Oceanographic Institution) Engineer Bob Elder prepares the REMUS 6000 autonomous underwater vehicle for testing in the harbor of Woods Hole in May 2008. The AUV is headed to Estonia this summer for deep-ocean survey work in the Baltic Sea and other northern European waters.
Engineer Bob Elder prepares the REMUS 6000 autonomous underwater vehicle for testing in the harbor of Woods Hole in May 2008. The AUV is headed to Estonia this summer for deep-ocean survey work in the Baltic Sea and other northern European waters.
(Photo by Tom Kleindinst, Woods Hole Oceanographic Institution) The REMUS 12.75 autonomous underwater vehicle (AUV) is loaded onto the research vessel Knorr in 2004 for one of its first tests at sea. Now known as REMUS 600 (for the depth it can dive, as opposed to its 12.75-inch diameter), the AUV was configured with forward fins for precise stability control.
The REMUS 12.75 autonomous underwater vehicle (AUV) is loaded onto the research vessel Knorr in 2004 for one of its first tests at sea. Now known as REMUS 600 (for the depth it can dive, as opposed to its 12.75-inch diameter), the AUV was configured with forward fins for precise stability control.
(Photo by Tom Kleindinst, Woods Hole Oceanographic Institution) Al Plueddemann and Glen Gawarkiewicz prepare to launch REMUS, an autonomous underwater vehicle, from R/V Tioga during a survey in shallow water off Chatham, Mass., in early 2006.
Al Plueddemann and Glen Gawarkiewicz prepare to launch REMUS, an autonomous underwater vehicle, from R/V Tioga during a survey in shallow water off Chatham, Mass., in early 2006.
(Photo by Christopher Linder, Woods Hole Oceanographic Institution) A REMUS-600 autononomous underwater vehicle sits on its cradle outside the Oceanographic Systems Lab. The AUV, which can dive to 600 meters, has a modular design to accommodate varying payloads and sensors. That large white section of the vehicle is the Small Synthetic Aperture Minehunter (SSAM), a high-resolution imaging sonar.
A REMUS-600 autononomous underwater vehicle sits on its cradle outside the Oceanographic Systems Lab. The AUV, which can dive to 600 meters, has a modular design to accommodate varying payloads and sensors. That large white section of the vehicle is the Small Synthetic Aperture Minehunter (SSAM), a high-resolution imaging sonar.
(Photo by Jayne Doucette, Woods Hole Oceanographic Institution) WHOI engineer Greg Packard prepares an autonomous underwater vehicle (AUV) called REMUS (Remote Environmental Monitoring UnitS) for loading onto the research vessel Knorr in 2004. REMUS vehicles are low-cost AUVs designed by the Oceanographic Systems Laboratory for coastal monitoring and survey operations at various depths in the ocean.
WHOI engineer Greg Packard prepares an autonomous underwater vehicle (AUV) called REMUS (Remote Environmental Monitoring UnitS) for loading onto the research vessel Knorr in 2004. REMUS vehicles are low-cost AUVs designed by the Oceanographic Systems Laboratory for coastal monitoring and survey operations at various depths in the ocean.
(Photo by Tom Kleindinst, Woods Hole Oceanographic Institution) During a 2006 pilot project to study the effect of ocean currents on fish larvae spawned on coral reefs in Belize, the autonomous underwater vehicle REMUS (an acronym for Remote Environmental Monitoring Units) was utilized to take images and collect environmental data on the reefs. After entering the water, REMUS uses acoustic navigation to independently survey an area while sensors inside the instrument sample and record the data. (Photo by Chris Linder, Woods Hole Oceanographic Institution)
During a 2006 pilot project to study the effect of ocean currents on fish larvae spawned on coral reefs in Belize, the autonomous underwater vehicle REMUS (an acronym for Remote Environmental Monitoring Units) was utilized to take images and collect environmental data on the reefs. After entering the water, REMUS uses acoustic navigation to independently survey an area while sensors inside the instrument sample and record the data. (Photo by Chris Linder, Woods Hole Oceanographic Institution) Greg Packard (right) puts a REMUS 600 autonomous underwater vehicle through pre-launch checks before testing near Woods Hole. The vehicle, capable of diving to 600 meters, carries sensors for underwater surveying and mapping and can be deployed through submarine torpedo tubes.
Greg Packard (right) puts a REMUS 600 autonomous underwater vehicle through pre-launch checks before testing near Woods Hole. The vehicle, capable of diving to 600 meters, carries sensors for underwater surveying and mapping and can be deployed through submarine torpedo tubes.
(Photo by Tom Kleindinst, Woods Hole Oceanographic Institution) Greg Packard prepares an autonomous underwater vehicle (AUV) REMUS equipped with synthetic aperture sonar for testing off the WHOI dock. Different sensors can be added to REMUS depending on the mission. The coastal research vessel Tioga is in the background. (Photo by Tom Kleindinst, Woods Hole Oceanographic Institution )
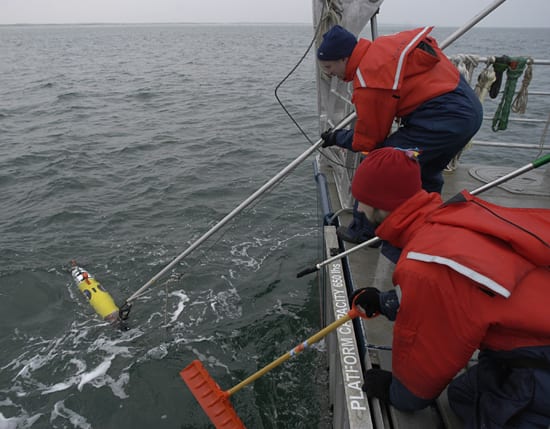
Greg Packard prepares an autonomous underwater vehicle (AUV) REMUS equipped with synthetic aperture sonar for testing off the WHOI dock. Different sensors can be added to REMUS depending on the mission. The coastal research vessel Tioga is in the background. (Photo by Tom Kleindinst, Woods Hole Oceanographic Institution ) Senior scientist Al Plueddemann hooks the handle of the autonomous underwater vehicle (AUV) REMUS so that it can be safely lifted onto the deck during a study of the wintertime coastal current system east of Cape Cod. Former WHOI postdoctoral fellow Andrey Shcherbina waits to prevent the REMUS from colliding with the stern of the R/V Tioga. Woods Hole Sea Grant funded the 2007 project, led by senior scientist Glen Gawarkiewicz of the Physical Oceanography department.
Senior scientist Al Plueddemann hooks the handle of the autonomous underwater vehicle (AUV) REMUS so that it can be safely lifted onto the deck during a study of the wintertime coastal current system east of Cape Cod. Former WHOI postdoctoral fellow Andrey Shcherbina waits to prevent the REMUS from colliding with the stern of the R/V Tioga. Woods Hole Sea Grant funded the 2007 project, led by senior scientist Glen Gawarkiewicz of the Physical Oceanography department.
(Photo by Chris Linder, Woods Hole Oceanographic Institution)













remus_packard_10.21.05_20920_99316.jpg
Image and Visual Licensing
WHOI copyright digital assets (stills and video) on this website can be licensed for non-commercial use upon request and approval. Please submit your request via our Media Request Form.
For assistance or accessibility accommodations, call (508) 289-2647.