 A rendering of NUI working on the underside of overlying ice. The system will be capable of taking samples and precisely placing probes or other tooling like suction samplers while "landed" on the underside of the ice or hovering a small distance away. A specially designed "bio-box" will enable the system to return buoyant samples to scientists. (Casey Machado)
A rendering of NUI working on the underside of overlying ice. The system will be capable of taking samples and precisely placing probes or other tooling like suction samplers while "landed" on the underside of the ice or hovering a small distance away. A specially designed "bio-box" will enable the system to return buoyant samples to scientists. (Casey Machado) A rendering of NUI working on the sea floor beneath overlying ice. The system will be capable of conducting a wide variety of standard manipulation tasks typically done by conventionally tethered ROVS, but at much greater range from a host vessel than is typically possible. NUI's unique 20 km tether permits a the host vessel to move independently from the vehicle, a necessary capability for prolonged sea floor intervention beneath a moving ice pack. NUI is shown in this rendering performing a push core of soft sediment beneath sea ice with the vessel potentially kilometers away.
A rendering of NUI working on the sea floor beneath overlying ice. The system will be capable of conducting a wide variety of standard manipulation tasks typically done by conventionally tethered ROVS, but at much greater range from a host vessel than is typically possible. NUI's unique 20 km tether permits a the host vessel to move independently from the vehicle, a necessary capability for prolonged sea floor intervention beneath a moving ice pack. NUI is shown in this rendering performing a push core of soft sediment beneath sea ice with the vessel potentially kilometers away.
A rendering of NUI transitting with manipulator and workspace tucked behing a low-drag cowling. NUI will be able to reconfigure itself underwater and in situ between the low-drag mode shown in this rendering and the manipulation mode shown in the previous two slides.
A low drag configuration is critical for enabling NUI, which carries its own batteries, to transit long distances (kms) between a host vessel and work sites that might be in otherwise inaccesible locations beneath glacial ice. In sea ice, a transit capability means NUI can perform mapping and sampling/intervention on the same mission, and retain enough reserve energy to transit back to the vessel for recovery.
NUI will reconfigure itself by rotating its "forehead" onto its "back" and then rotating the arm out of its stowed horizontal position into a more typical vertical position. A "visor," shown here in conceptual form, will cover the "mouth" area in a later iteration.
(Casey Machado) The manipulator integration concept was mocked up at the Deep Submergence Laboratory at WHOI. The manipulator arm itself will be delivered in mid-March 2016 from Kraft Telerobotics. The hedgehog/PVC is a stand-in for evaluating camera views.
The manipulator integration concept was mocked up at the Deep Submergence Laboratory at WHOI. The manipulator arm itself will be delivered in mid-March 2016 from Kraft Telerobotics. The hedgehog/PVC is a stand-in for evaluating camera views. The mock up was used to evaluate camera placements and ensure the system would be capable of manipulating both on the sea floor and on the underside of the ice. The upper two images show two views of the workspace with the "forehead" in its open position. The lower two images show views through NUI's main HD camera with the forehead in its closed (low-drag) position. The existing forehead will be slightly modified to reduce the occluded areas visible in the lower two images.
The mock up was used to evaluate camera placements and ensure the system would be capable of manipulating both on the sea floor and on the underside of the ice. The upper two images show two views of the workspace with the "forehead" in its open position. The lower two images show views through NUI's main HD camera with the forehead in its closed (low-drag) position. The existing forehead will be slightly modified to reduce the occluded areas visible in the lower two images. The workspace concept with 7-function manipulator arm from Kraft Telerobotics in its deployed location. Detailed design is underway.
The workspace concept with 7-function manipulator arm from Kraft Telerobotics in its deployed location. Detailed design is underway.
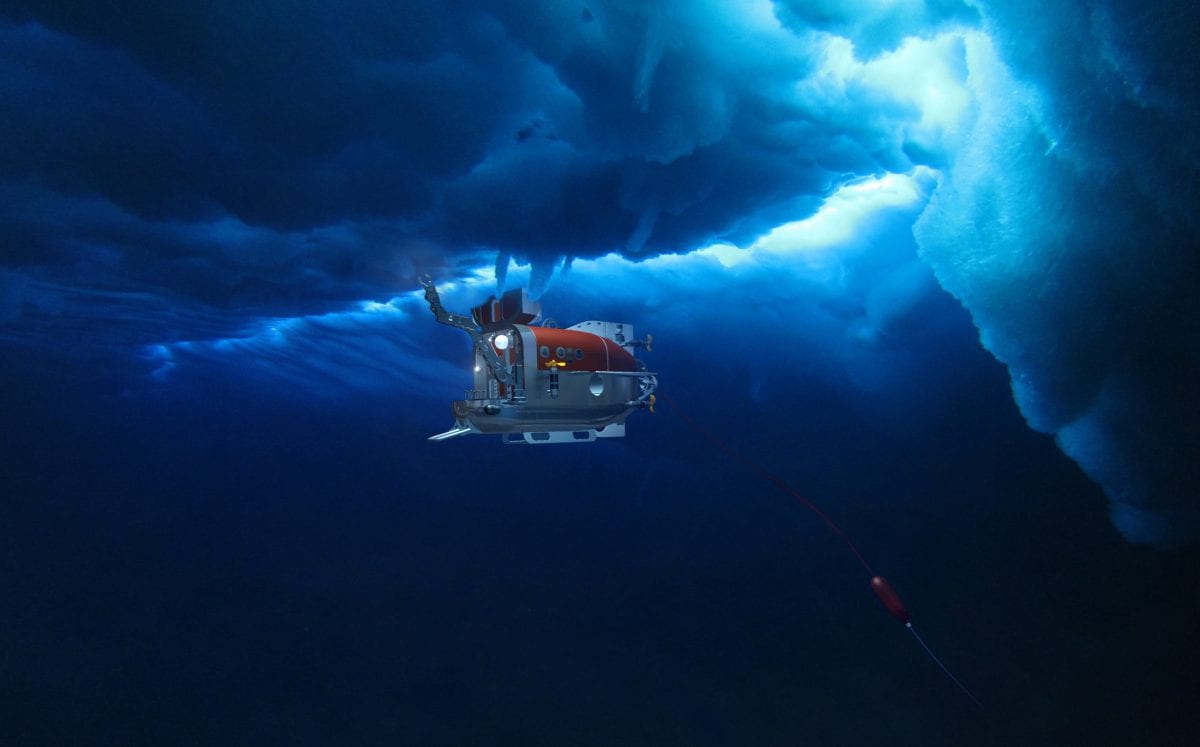
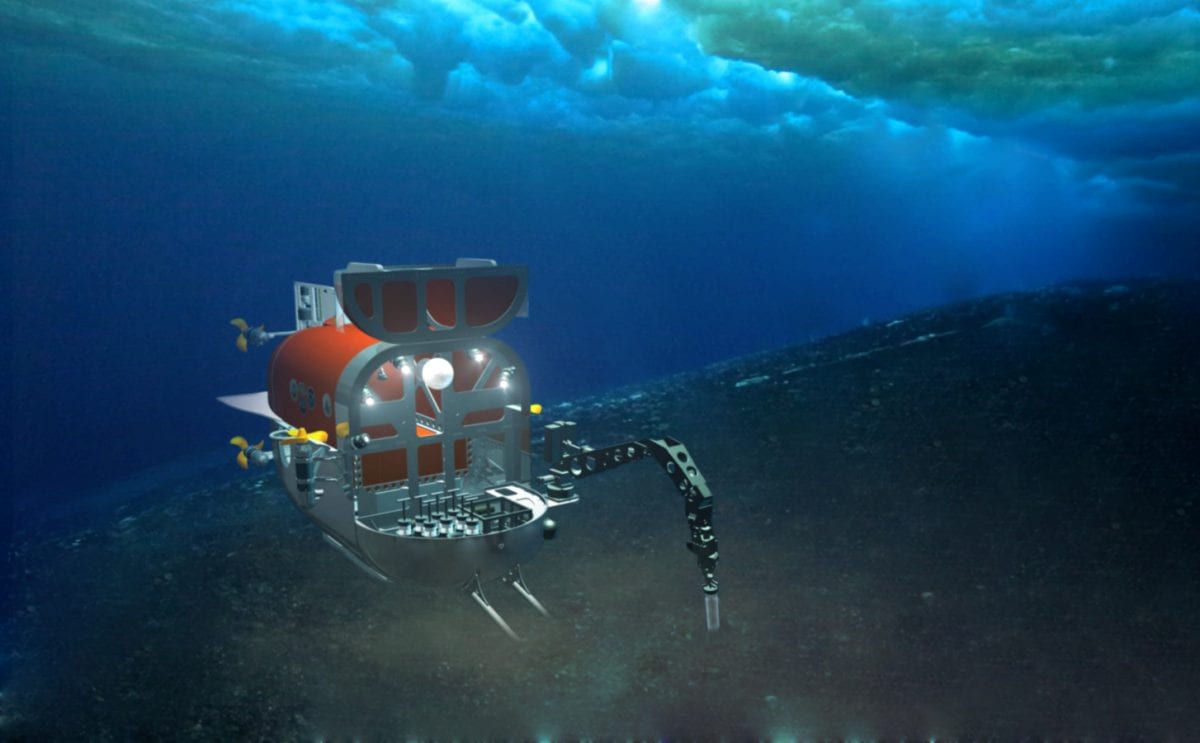
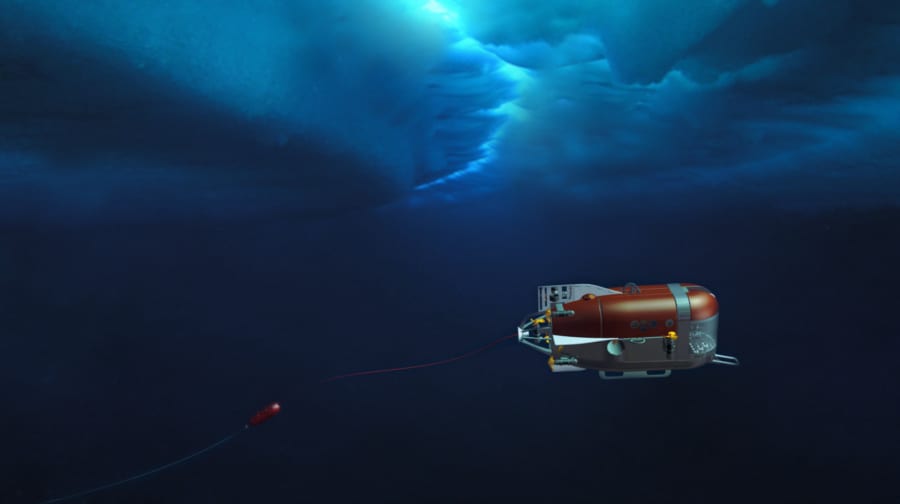

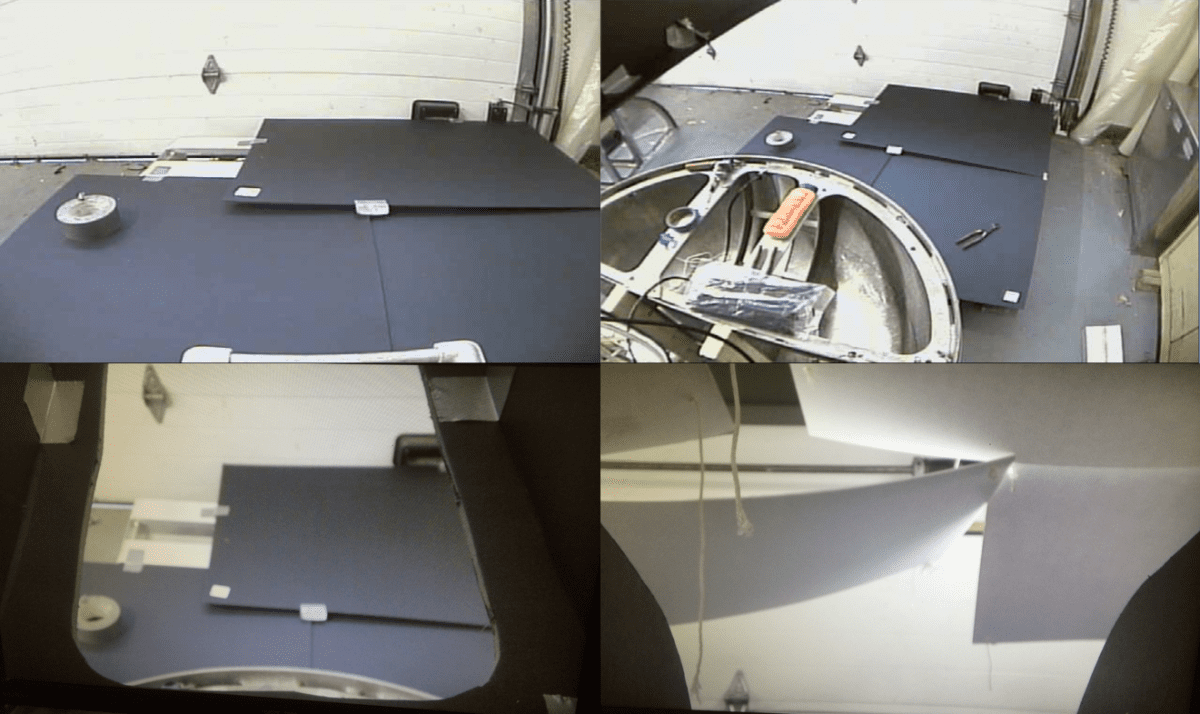
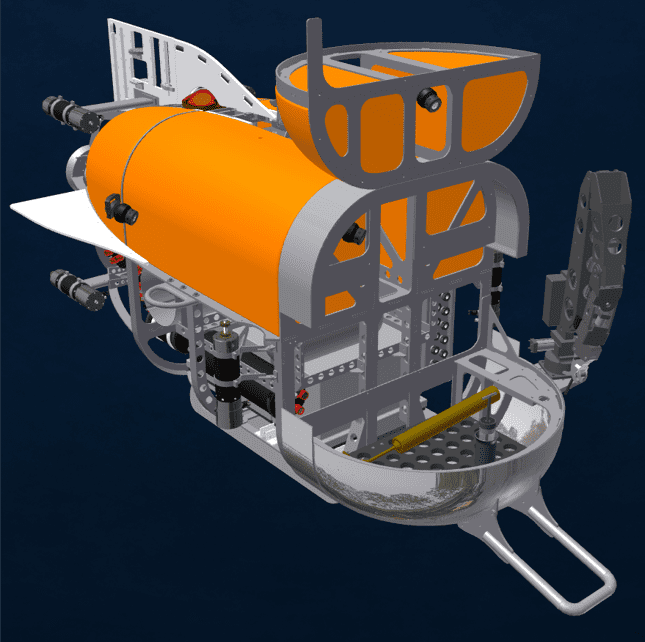
Image and Visual Licensing
WHOI copyright digital assets (stills and video) on this website can be licensed for non-commercial use upon request and approval. Please submit your request via our Media Request Form.
For assistance or accessibility accommodations, call (508) 289-2647.