Discovering Hydrothermal Vents

Click to enlarge »
Dredging and sounding equipment on the H.M.S. Challenger. (NOAA Photo Library)
Click to enlarge »
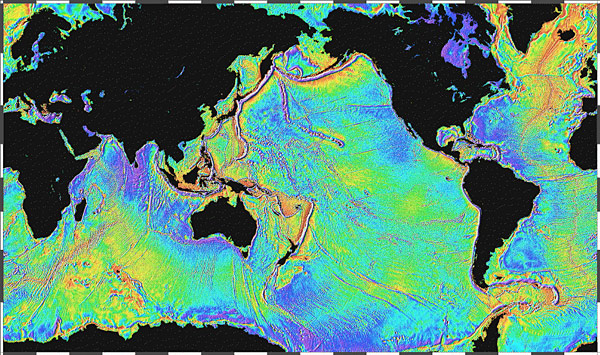
The surface of the ocean bulges outward and inward mimicking the topography of the ocean floor. The bumps, too small to be seen, can be measured by a radar altimeter aboard a satellite. (Source: NOAA; David T. Sandwell, Scripps Institution of Oceanography & Walter H. F. Smith, Geosciences Laboratory, NOAA)

Click to enlarge »
The Autonomous Benthic Explorer (ABE) is a fully autonomous vehicle used for survey of the deep seafloor for depths of 5000 meters. (© Woods Hole Oceanographic Institution)
Click to enlarge »
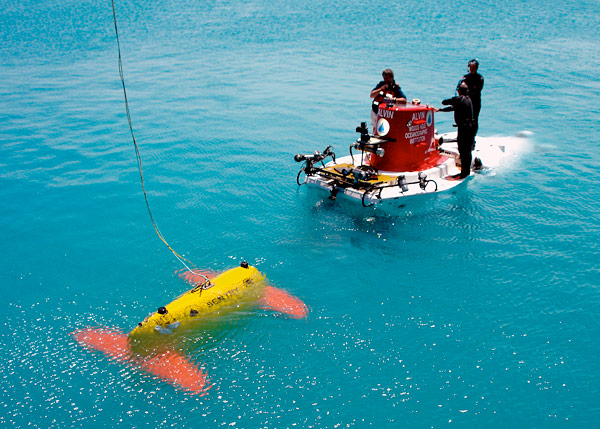
The new Sentry autonomous underwater vehicle meets the submersible Alvin during a testing expedition off Bermuda in April 2006. (Photo by Chris German, Woods Hole Oceanographic Institution)

Click to enlarge »
The Monterey Bay Aquarium Research Institute (MBARI) Mapping AUV is a torpedo-shaped vehicle equipped with four mapping sonars that operate simultaneously during a mission. (©MBARI)

Tiburon is a unique new ROV developed at MBARI. The system breaks new ground in providing an integrated unmanned submersible research platform, with many powerful features providing efficient, reliable and precise sampling and data collection in a wide range of missions. (©MBARI)
") Click to enlarge »
The French research institute, IFREMER, has developed Victor, a deepwater, remote-controlled vehicle. It is instrumented and modular and can perform high quality optical imaging and can carry and operate various equipment and scientific tools. (©IFREMER)
Click to enlarge »
The French research institute, IFREMER, has developed Victor, a deepwater, remote-controlled vehicle. It is instrumented and modular and can perform high quality optical imaging and can carry and operate various equipment and scientific tools. (©IFREMER)
 Click to enlarge »The MIR submersibles were built in Finland in 1987 and are owned and operated by the PP Shirshov Institute of Oceanology, Russian Academy of Sciences, Moscow. (© P.P. Shirshov Institute of Oceanology)
Click to enlarge »The MIR submersibles were built in Finland in 1987 and are owned and operated by the PP Shirshov Institute of Oceanology, Russian Academy of Sciences, Moscow. (© P.P. Shirshov Institute of Oceanology)

Click to enlarge »
A welder works on the Nereus (HROV) frame. (Photo by Tom Kleindinst, WHOI)
In this section...
Modern oceanography began with the Challenger Expedition (1872-1876). On that voyage new methods for dredging the seafloor and sampling the ocean water were tried, and new technologies, like deep-sea winches and specialized ropes for lowering equipment were tested. In the 125 years since the Challenger Expedition, oceanographic science and the technologies used to study the ocean have advanced significantly.
We can now resolve the topography of the ocean basins on scales that span thousands of kilometers using satellite altimetry data, as well as map specific seafloor features in great detail (sub-meter resolution) using submersible vehicles. Many of these advances have resulted directly from new technologies used to sample, measure, and map the ocean and seafloor. Knowing the position and morphology of the global Mid-Ocean Ridge (MOR) crest is essential to locate areas that may have greater numbers of hydrothermal vent sites. This knowledge helps to focus where detailed multibeam mapping and submersible studies are needed to locate new vents.
Research ships have been the primary vehicles in which scientists go to sea and carry out their studies. Traditional ship-based oceanography will continue to play a major role in the oceanographic sciences in the 21st century, but the sensor and submersible technologies available for deployment from the ships have significantly increased the scope, efficiency and accuracy of the field experiments. Some of the newest sensors and vehicles also permit time-series measurements of oceanographic phenomena, including seawater temperature, turbidity, current speed and chemistry. We now know that taking continuous measurements over time spans of minutes, months and decades gives us a much better understanding of the relationships between physical, chemical and biological processes in the ocean and at the seafloor.
Submersible vehicles that permit exploration of the ocean and seafloor have rapidly developed over the last 15 years, advancing beyond research submarines that carry a pilot and a few observers, to sophisticated remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs). These new robotic vehicles have significantly expanded the depth and geographic range of our explorations and the efficiency with which we can access the deep ocean and seafloor. The fiber-optic cable that tethers the ROV to the surface ship transmits gigabytes of data from the depths to the surface ship and supplies power to operate the vehicle propulsion, navigation, sampling and light systems. Dozens of scientists can participate in seafloor observations and sampling for days at a time, around the clock, when using ROVs.
21st century seafloor exploration technology will also rely on several key areas of engineering including satellite connectivity and autonomous vehicles. Global communications via satellites enable smart sensors on autonomous vehicles to telemeter data to shore from the farthest reaches of the ocean basins. AUVs can now be programmed to conduct surveys over hundreds of square kilometers of seafloor to search for hydrothermal plumes and gradients in those plumes that can lead to seafloor vent sites. New algorithms that use the real time data collected during a mission permit the AUVs to be ‘smart’ and alter their programmed survey pattern to ‘home-in’ on a suspected seafloor vent site.
Several types of AUVs have been developed to work in both shallow and some of the deepest regions of the oceans. The shapes of these vehicles have been designed to allow them to move through the water very efficiently, using low-levels of power so that they can stay submerged for a few days. Using the latest in lithium-ion battery technology, AUVs can normally cover hundreds of kilometers of track while collecting data about seawater properties, high-resolution bathymetry, and even photographs of the seafloor.
The latest developments in ocean science and technology have led to major international efforts to establish ocean observing systems. Ocean floor obser vatories are being developed in coastal areas to monitor the geology, chemistry and biology of important fisheries and study the impact of humans and extreme climate events. Seafloor observatories are also planned in oceanic trenches adjacent to major population areas, like in Japan and offshore Washington and Oregon where the large earthquakes occur and where tsunamis can be generated. Ocean floor observatories are also planned at select mid-ocean ridges to study crustal generation processes that include time-series studies of hydrothermal vents and the impacts that volcanic eruptions and earthquakes have on vent fluids and animal communities.
| Vehicle | Operating Organization |
Maximum Operating Depth (m) |
Purpose |
| TowCam | WHOI, USA | 6,500 | Photo imagery; CTD; volcanic glass samples; water samples |
| Deep-Tow Survey System |
COMRA, China | 6,000 | Sidescan, bathymetry; sub-bottom Profiling; |
| DSL-120A | HMRG, USA | 6,000 | Sidescan; bathymetry |
| IMI-30 | HMRG, USA | 6,000 | Sidescan; bathymetry; sub-bottom profiling |
| Scampi | IFREMER, France | 6,000 | Photo & video imagery |
| Système Acoustique Remorqué (SAR) |
IFREMER, France | 6,000 | Sidescan; sub-bottom profiling; magnetics; bathymetry |
| SHRIMP | NOC, UK | 6,000 | Photo & video imagery |
| TOBI | NOC, UK | 6,000 | Sidescan; bathymetry; magnetics |
| BRIDGET | NOC, UK | 6,000 | Geochemistry |
| Deep Tow 6KC | JAMSTEC, Japan | 6,000 | Photo & video imagery |
| Deep Tow 4KC | JAMSTEC, Japan | 4,000 | Photo & video imagery |
| Deep Tow 4KS | JAMSTEC, Japan | 4,000 | Sidescan; sub-bottom profiling |
| Vehicle | Operating Organization | Maximum Operating Depth (m) |
| HOV (under construction) |
COMRA, China | 7,000 |
| Shinkai 6500 | JAMSTEC, Japan | 6,500 |
| Replacement HOV (in planning stages) |
NDSF, WHOI, USA | 6,500 |
| MIR I & II | P.P. Shirshov Institute of Oceanology, Russia | 6,000 |
| Nautile | IFREMER, France | 6,000 |
| Alvin | NDSF, WHOI, USA | 4,500 |
| Pisces IV | HURL, USA | 2,170 |
| Pisces V | HURL, USA | 2,090 |
| Johnson-Sea-Link I & II | HBOI, USA | 1,000 |
| Vehicle | Operating Organization | Maximum Operating Depth (m) |
| Nereus (hybrid) (under construction) |
NDSF, WHOI, USA | 11,000 |
| Kaiko 7000 | JAMSTEC, Japan | 7,000 |
| Isis | NOC, UK | 6,500 |
| Jason II | NDSF, WHOI, USA | 6,500 |
| ATV | SIO, USA | 6,000 |
| CV (Wireline Reentry System) | SIO, USA | 6,000 |
| Victor 6000 | IFREMER, France | 6,000 |
| ROV (on order) | NOAA Office of Ocean Exploration, USA | 6,000 |
| ROPOS | CSSF, Canada | 5,000 |
| Tiburon | MBARI, USA | 4,000 |
| Quest | Research Centre Ocean Margins, Germany | 4,000 |
| Hercules | Institute for Exploration, USA | 4,000 |
| Sea Dragon 3500 | COMRA, China | 3,500 |
| Hyper Dolphin | JAMSTEC, Japan | 3,000 |
| Aglantha | Institute of Marine Research, Norway | 2,000 |
| Ventana | MBARI, USA | 1,500 |
| Cherokee | Research Centre Ocean Margins, Germany | 1,000 |
| Vehicle | Operating Organization | Maximum Operating Depth (m) |
| Dorado Class | MBARI, USA | 6,000 |
| CR-01, CR-02 | COMRA, China | 6,000 |
| Sentry | WHOI, USA | 6,000 |
| REMUS Class | WHOI, USA | 6,000 |
| Autosub 6000 (under construction) |
NOC, UK | 6,000 |
| Autonomous Benthic Explorer | NDSF, WHOI, USA | 5,500 |
| Explorer 5000 | Research Centre Ocean Margins, Germany | 5,000 |
| Jaguar/Puma (under construction) |
WHOI, USA | 5,000 |
| Urashima (hybrid) | JAMSTEC, Japan | 3,500 |
| Aster x | IFREMER, France | 3,000 |
| Bluefin AUV | Alfred Wegener Institute, Germany | 3,000 |
| Bluefin 21 AUV | SIO, USA | 3,000 |
| Odyssey Class | MIT, USA | 3,000 |
| SeaBED | WHOI, USA | 2,000 |
| Autosub 3 | National Oceanography Centre, UK | 1,600 |
| Spray Gliders | WHOI, USA | 1,500 |
| Seaglider | U. Washington, USA | 1,000 |
COMRA – China Ocean Mineral Resources R & D Association
CSSF – Canadian Scientific Submersible Facility, Canada
HBOI – Harbor Branch Oceanographic Institution, USA
HMRG – Hawaii Mapping Research Group, USA
HURL – Hawaii Undersea Research Laboratory, USA
IFREMER – French Research Institute for Exploration of the Sea
JAMSTEC – Japan Marine Science & Technology Center, Japan
MBARI – Monterey Bay Aquarium Research Institute
NDSF, WHOI – National Deep Submergence Facility, Woods Hole Oceanographic Institution, USA
NOC – National Oceanographic Centre, Southampton, UK
SIO – Scripps Institution of Oceanography, USA
WHOI – Woods Hole Oceanographic Institution, USA
![]() Terms of Use · About us · Contact Us · Privacy · Sitemap
Terms of Use · About us · Contact Us · Privacy · Sitemap
Copyright Woods Hole Oceanographic Institution · Dive and Discover™ is a registered trademark of the Woods Hole Oceanographic Institution
With funding from the National Science Foundation, NOAA's Ocean Explorer Program, the National Marine Sanctuary Foundation, and WHOI's Deep Ocean Exploration Institute