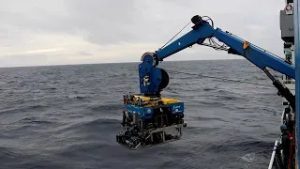
This Remus 6000 animation illustrates the large survey mapping and detailed imaging capabilities of the autonomous underwater vehicle.
More Content From :
Ocean Tech




SEARCH RELATED TOPICS: Ocean Tech / Underwater Vehicles
Image and Visual Licensing
WHOI copyright digital assets (stills and video) on this website can be licensed for non-commercial use upon request and approval. Please submit your request via our Media Request Form.
For assistance or accessibility accommodations, call (508) 289-2647.