
Underwater Robot Sheds New Light on Antarctic Sea Ice
November 24, 2014
The first detailed, high-resolution 3-D maps of Antarctic sea ice have been developed using an underwater robot. Scientists from the UK, USA and Australia say the new technology provides accurate ice thickness measurements from areas that were previously too difficult to access.
The results, published Nov. 24, 2014, in the journal Nature Geoscience, step up the pace of research in the polar regions aimed at understanding the dramatic sea ice changes in the context of climate change.
Scientists use a range of technologies and techniques to measure sea ice thickness. Satellite observations can measure large-scale thickness from space, but interpreting the data accurately can be difficult due to snow cover on the ice. Measurements made on the sea ice by drilling holes, together with visual observations from ships are critical for building a more complete picture, but difficulties in getting access to thicker areas of sea ice leaves gaps in the data. Now, with the Autonomous Underwater Vehicle (AUV) known as SeaBED, scientists have an invaluable new tool to fill this gap.
While most oceanographic survey instruments look down at the seafloor, SeaBED was fitted with an upward-looking sonar in order to measure and map the underside of sea ice floes. The AUV operated at a depth of 20 to 30 meters and was driven in a lawnmower pattern. These lines of data were merged to form high-resolution 3D bathymetric surveys of the underside of the ice.
The yellow SeaBED robot, which is approximately two meters long and weighs nearly 200 kilograms, has a twin-hull design that gives the robot enhanced stability for low-speed photographic surveys.
“Putting an AUV together to map the underside of sea ice is challenging from a software, navigation and acoustic communications standpoint,” says Hanumant Singh, an engineering scientist at the Woods Hole Oceanographic Institution (WHOI) whose lab designed, built and operated the AUV.
“SeaBED’s maneuverability and stability made it ideal for this application where we were doing detailed floe-scale mapping and deploying, as well as recovering in close-packed ice conditions. It would have been tough to do many of the missions we did, especially under the conditions we encountered, with some of the larger vehicles.”
“The full 3-D topography of the underside of the ice provides a richness of new information about the structure of sea ice and the processes that created it,” adds co-author Guy Williams from Institute of Antarctic and Marine Science. “This is key to advancing our models particularly in showing the differences between Arctic and Antarctic sea ice.”
The data from SeaBED, combined with airborne measurements of sea-ice surface elevation, ice coring surveys, and satellite observations, vastly improves scientists’ estimates of ice thickness and total sea ice volume.
“The AUV missions have given us a real insight into the nature of Antarctic sea ice – like looking through a microscope. We can now measure ice in far greater detail and were excited to measure ice up to 17 meters thick,” says co-author Jeremy Wilkinson from British Antarctic Survey.
The team deployed AUVs as part of two Antarctic cruises (IceBell and SIPEX-2) in 2010 and 2012 in the austral spring. The first expedition was on the British Antarctic Survey’s RRS James Clark Ross and the second on the Australian icebreaker the RSV Aurora Australis. Three locations around the Antarctic Peninsula were mapped —the Weddell, Bellingshausen and Wilkes Land sectors covering an area of 500,000 square meters.
The next steps are for the scientists to do large-scale surveys that can be compared to large-scale observations from aircraft and satellites.
“What this effort does is show that observations from AUVs under the ice are possible and there is a very rich data set that you can get from them,” says Ted Maksym, a WHOI scientist and co-author of the paper. “This work is an important step toward making the kinds of routine measurements we need in order to really monitor and understand what’s happening with the ice and the large scale changes that are occurring.”
The research was carried out by scientists at the Institute of Antarctic and Marine Science (Australia), Antarctic Climate and Ecosystem Cooperative Research Centre (Australia), Woods Hole Oceanographic Institution (USA) and British Antarctic Survey (UK).
Funding for the work came from the Antarctic Climate and Ecosystem Cooperative Research Centre, the British Antarctic Survey, and the Natural Environment Research Council. The U.S. National Science Foundation, which funding the SeaBEd development, manages the U.S Antarctic Program.
The Woods Hole Oceanographic Institution is a private, non-profit organization on Cape Cod, Mass., dedicated to marine research, engineering, and higher education. Established in 1930 on a recommendation from the National Academy of Sciences, its primary mission is to understand the ocean and its interaction with the Earth as a whole, and to communicate a basic understanding of the ocean’s role in the changing global environment. For more information, please visit www.whoi.edu.

The team deployed the SeaBED AUV as part of two Antarctic cruises in 2010 and 2012 in the austral spring. Three locations around the Antarctic Peninsula were mapped —the Weddell, Bellingshausen and Wilkes Land sectors covering an area of 500,000 square meters.
(Hanu Singh, Woods Hole Oceanographic Institution)
Researchers drill through the sea ice in the Bellingshausen Sea to position a navigational transceiver before a deployment of the SeaBED AUV. (Peter Kimball, Woods Hole Oceanographic Institution)
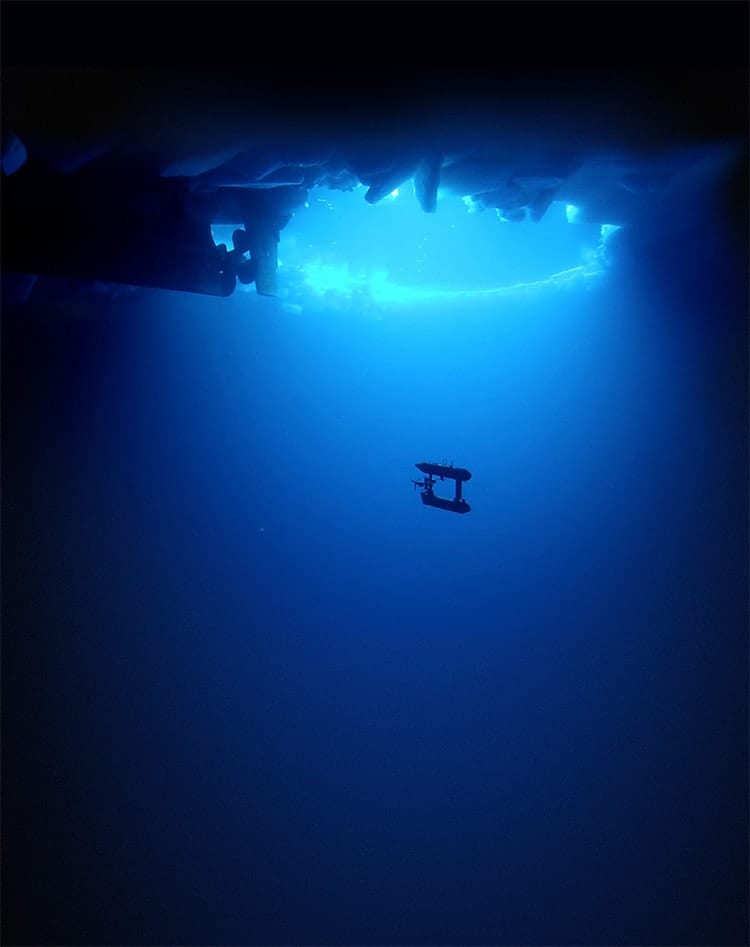
The SeaBED AUV (also called 'Jaguar') mapping under the sea ice.
(Klaus Meiners, Australian Antarctic Division, Peter Kimball, Woods Hole Oceanographic Institution)