|

|

|

|

|

|

|
| Back to WHOI Arctic Group Projects | ||||
| ||||
|
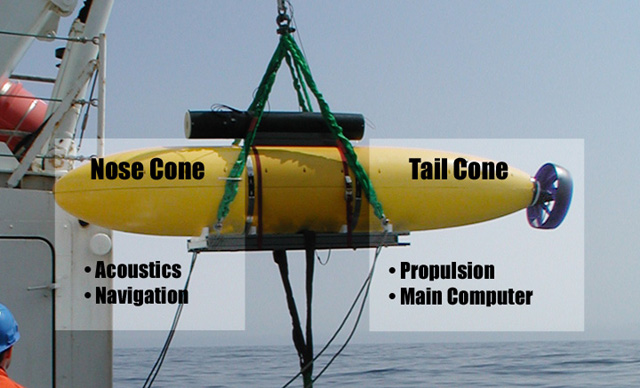
APOGEE is an Autonomous Underwater Vehicle (AUV) specially designed to conduct scientific investigations under ice-covered bodies of water, and under the polar ice caps, in particular. In the open ocean autonomous oceanographic equipment is typically recovered by snatching up a piece of gear that has surfaced for recovery. This approach doesn't work so well in polar seas because the equipment doesn't surface for recovery so much as it traps itself under the ice.
How does APOGEE work?
| ||||
|
Broadband seismology in the Arctic?
The original motivation behind APOGEE was to make broadband seismic measurements in the high Arctic. To do this the vehicle must be capable of remaining stationary on the deep seafloor for long periods of time. A heavy weight is affixed to the bottom of the vehicle for this purpose. (Quick time movie of AUV on the seafloor). The weight is jettisoned after the measurements have been made, and a flotation package then carries the vehicle up to the sea/ice interface on a tether. The tether is released in shallow water, and the vehicle is then free to navigate itself to the homing beacon for recovery. (Quick time movie of recovery sequence) AUVs haven't been designed to remain stationary on the seafloor for long periods of time, and this aspect is one of the more difficult development tasks confronting us. We're a bit uneasy about the idea of turning the AUV "off" and abandoning it on the Arctic seafloor for long periods of time, but that is exactly what we are going to try to do. A nice strategy would be to leave a vehicle on the seafloor at the end of the field season and let it spend the winter there making seismic and/or other sorts of monitoring style measurements. The vehicle would then be recovered at the beginning of the following field season, thereby providing a means to acquire year-round data of various sorts from essentially anywhere on the Arctic seafloor. | ||||
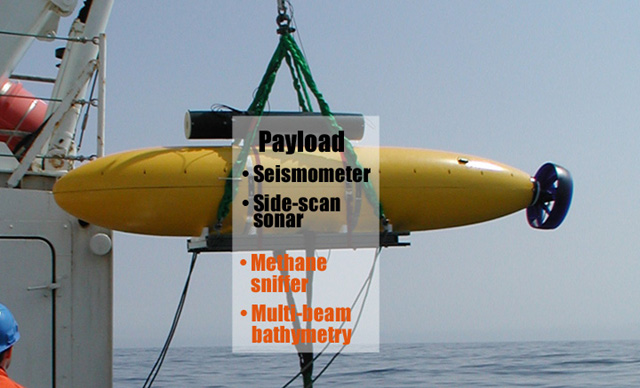
What measurements can APOGEE make?
| ||||
|
How
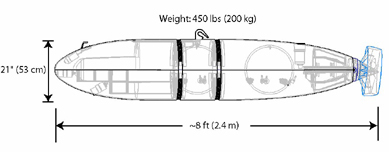
big is the vehicle?
The vehicle is 21" (53 cm) in diameter, and about 8 ft. (2.5 m) long. It weighs about 450 lbs. (200 kg). It is capable of operating at water depths up to 4500 m with a nominal velocity of 3 kts (1.5 m/s). In a survey mode it has a maximum range of about 50 km (30 mi).
| ||||
|
When will the vehicle be ready for polar missions?
Sea trials for the prototype APOGEE vehicle began in May 2001, and run essentially through the end of the year. The first trials were carried out on the R/V Endeavor just off the continental margin of the Northeastern United States. The vehicle was lowered on a tether with communications and the basic vehicle systems and functionality were tested down to a water depth of 3000 m. The deep-water test was very useful and some minor design/operational flaws were uncovered that were easy to fix, but would have caused much weeping and gnashing of teeth had they not been detected. With these fixes in place the vehicle begins swimming and homing trials in Woods Hole harbor mid-June 2001. A full set of trials were undertaken at the end of July 2001 in Bermuda on the R/V Weatherbird II. Click here to go to the Bermuda sea trials APOGEE page. | ||||
|
Who takes the blame if the vehicle is lost?
The APOGEE (Autonomous Polar Geophysical Explorer) project is a joint effort between the Woods Hole Oceanographic Institution, the Lamont Doherty Earth Observatory, and the Bluefin Robotics Corporation. Initial funding to develop and test a prototype vehicle has been obtained from the National Science Foundation Office of Polar Programs. The principal investigators for the APOGEE project are Rob Sohn and Hanumant Singh at the Woods Hole Oceanographic Institution, and Spahr Webb at the Lamont Doherty Earth Observatory. The AUV technology behind our effort was developed by the Bluefin Robotics Company, largely with funding from the Office of Naval Research. Bluefin Robotics is a spin-off company from the Ocean Engineering Department of the Massachusetts Institute of Technology. Rob Sohn is the point of contact for APOGEE, and you can email him at rsohn@whoi.edu, or call him at (508) 289-3616.
Why ask why? A Historical perspective on Arctic research
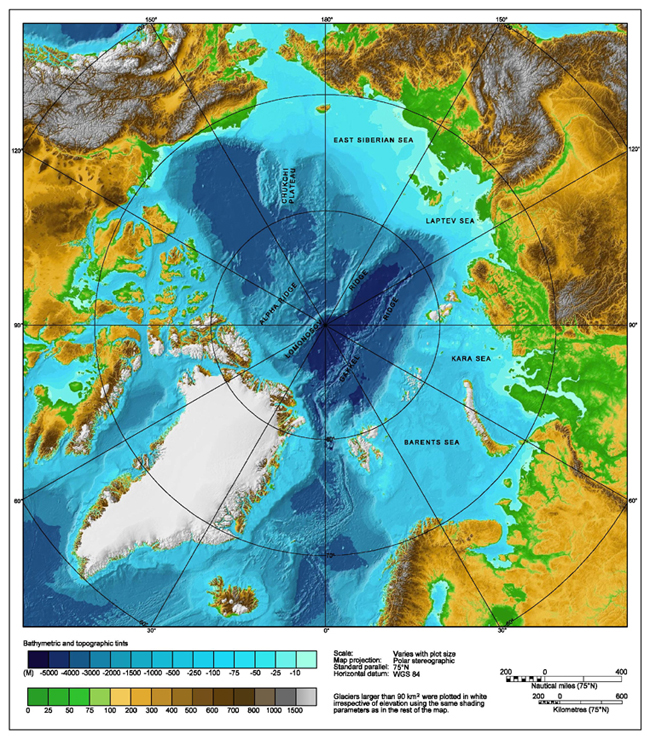
"...notwithstanding I can greatly commend those valiant minds that doe attempt such voyages, and the rather when they doe it for knowledge sake, and profit all their countrie, and not altogether for private gaine and lucre." Thomas Blundeville, 1613, Of Arctic voyages (from the comfort of a London fireside) Of all the world's oceans, the Arctic has been the most reluctant to divulge her secrets. Positioned at the top of the world and covered with a permanent layer of ice, the Arctic Ocean remains largely unexplored and poorly understood, even in the face of 20th century technology. In 1889 Captain Otto Sverdrup sailed the Fram into the East Siberian Sea, and let it freeze into the pack ice northeast of the New Siberian Islands. Over the next three years the Fram drifted in the transpolar current and became the first scientific station to drift across the Arctic Ocean. During this expedition bathymetric soundings in excess of 3000 meters were recorded, and the existence of a deep ocean basin beneath the ice cap was discovered.
In this regard the APOGEE project is simply one of the more recent attempts to penetrate and explore the ice-covered Arctic Basin. Our approach is to use Autonomous Underwater Vehicle (AUV) technology to get beneath the ice and to make scientific observations. The idea of getting beneath the ice to avoid many of the obstacles to Arctic Ocean navigation is not new. In 1648 Bishop John Wilkins of England proposed that "voyages to the polar regions by submarine vessels would be safe from the uncertainty of tides, the violence of tempests, and from ice and great frosts." Wilkins was apparently a man of great vision, but little good it did him personally since submarine technology didn't mature until some 300 years later. Submarines have in fact proven to be tremendously useful for exploring and mapping the Arctic Basin, though much of the data acquired by the military remains classified. The Navy and the National Science Foundation teamed up from 1995-1999 with the SCICEX program to use the nuclear submarine USS Hawkbill for scientific investigations in the Arctic. A variety of fascinating observations were made, but the cost of operating nuclear submarines is essentially beyond the financial means allocated for civilian polar research, and this has put further plans on ice (sic). AUVs are much less expensive to operate than nuclear submarines. You don't need a nuclear reactor, for one thing, nor do you need to accommodate a sub full of hungry sailors. They're also much less expensive to build (a gross understatement), so all in all they have the potential to provide an extremely cost effective means of making scientific observations beneath the ice cap. We're hoping that our development effort will allow us to contribute to Arctic Basin exploration and investigation in a significant way, and at a price that is consistent with civilian polar research budgets. For practical aspects of why it is so important to extend our experimental presence into the Arctic, you can check out the WHOI Arctic Links. |
||||
|
|